commande optimale de l'alterno- demarreur avec prise en ... - UTC
commande optimale de l'alterno- demarreur avec prise en ... - UTC
commande optimale de l'alterno- demarreur avec prise en ... - UTC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
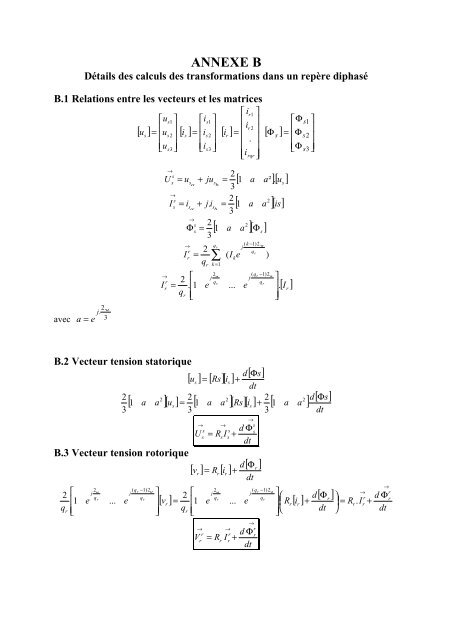
ANNEXE B<br />
Détails <strong>de</strong>s calculs <strong>de</strong>s transformations dans un repère diphasé<br />
B.1 Relations <strong>en</strong>tre les vecteurs et les matrices<br />
<strong>avec</strong><br />
a = e<br />
2.<br />
.<br />
3<br />
π<br />
j<br />
⎡u<br />
⎢<br />
⎢<br />
⎢⎣<br />
u<br />
s1<br />
⎤<br />
⎥<br />
⎥<br />
⎥⎦<br />
[ u ] = u [ i ] = i [ i ]<br />
s<br />
s2<br />
s3<br />
s<br />
⎡i<br />
⎢<br />
⎢<br />
⎢⎣<br />
i<br />
s1<br />
s2<br />
s3<br />
⎤<br />
⎥<br />
⎥<br />
⎥⎦<br />
r<br />
⎡ ir1<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
ir<br />
2<br />
= ⎥<br />
⎢ . ⎥<br />
⎢ ⎥<br />
⎢⎣<br />
irqr<br />
⎥⎦<br />
[ Φ ]<br />
→<br />
s<br />
U s<br />
2<br />
= usα<br />
+ jusβ<br />
=<br />
3<br />
.<br />
→<br />
s<br />
I s<br />
2<br />
= isα<br />
+ j.<br />
isβ<br />
= 1<br />
3<br />
a<br />
2<br />
a is<br />
→<br />
s<br />
Φs<br />
2<br />
= [ 1<br />
3<br />
a<br />
2<br />
a ][ Φs<br />
]<br />
→<br />
r<br />
Ir<br />
→<br />
r<br />
Ir<br />
2 ⎡<br />
= . ⎢1<br />
qr<br />
⎢⎣<br />
B.2 Vecteur t<strong>en</strong>sion statorique<br />
2<br />
3<br />
B.3 Vecteur t<strong>en</strong>sion rotorique<br />
2 ⎡<br />
⎢1<br />
qr<br />
⎢⎣<br />
e<br />
2<br />
=<br />
q<br />
q<br />
r<br />
∑<br />
r k = 1<br />
e<br />
2π<br />
j<br />
q<br />
( I<br />
[ ] = [ Rs][<br />
i ]<br />
us s<br />
k<br />
[ 1 a a²<br />
][ u ]<br />
s<br />
[ ][ ]<br />
e<br />
( k −1)<br />
2.<br />
π<br />
j<br />
qr<br />
( qr<br />
−1)<br />
2π<br />
j ⎤<br />
r qr<br />
... e ⎥.<br />
⎥⎦<br />
[ Φs]<br />
d<br />
+<br />
dt<br />
)<br />
⎡Φ<br />
=<br />
⎢<br />
⎢<br />
Φ<br />
⎢⎣<br />
Φ<br />
s<br />
[ I ]<br />
r<br />
s1<br />
s2<br />
s3<br />
2 2<br />
2 2<br />
2<br />
[ 1 a ][ u ] = [ 1 a a ][ Rs][<br />
i ] + [ 1 a a ]<br />
a s<br />
s<br />
⎤<br />
3<br />
→<br />
s<br />
s<br />
U<br />
→<br />
→<br />
s<br />
s d Φs<br />
= RsI<br />
s +<br />
dt<br />
[ v ] = R [ i ]<br />
r<br />
r<br />
r<br />
[ Φ ]<br />
d<br />
+<br />
dt<br />
2π ( qr<br />
−1)<br />
2π<br />
2π<br />
( qr<br />
−1)<br />
2π<br />
j<br />
j<br />
qr<br />
q 2<br />
r ... e ⎥ r<br />
qr<br />
⎥⎦<br />
⎡<br />
j<br />
j<br />
qr<br />
qr<br />
[ v ] = ⎢1<br />
e ... e ⎥ R [ i ]<br />
⎢⎣<br />
→<br />
r<br />
r<br />
V<br />
→<br />
→ r<br />
r d Φr<br />
=<br />
Rr<br />
Ir<br />
+<br />
dt<br />
r<br />
3<br />
⎤<br />
⎥<br />
⎥<br />
⎥⎦<br />
[ Φs]<br />
d<br />
dt<br />
[ ]<br />
⎤⎛<br />
d Φ<br />
⎜ r r +<br />
⎥⎦<br />
⎝ dt<br />
r<br />
→<br />
→ r<br />
⎞ r d Φr<br />
⎟ = Rr.<br />
Ir<br />
+<br />
⎠ dt