commande optimale de l'alterno- demarreur avec prise en ... - UTC
commande optimale de l'alterno- demarreur avec prise en ... - UTC
commande optimale de l'alterno- demarreur avec prise en ... - UTC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
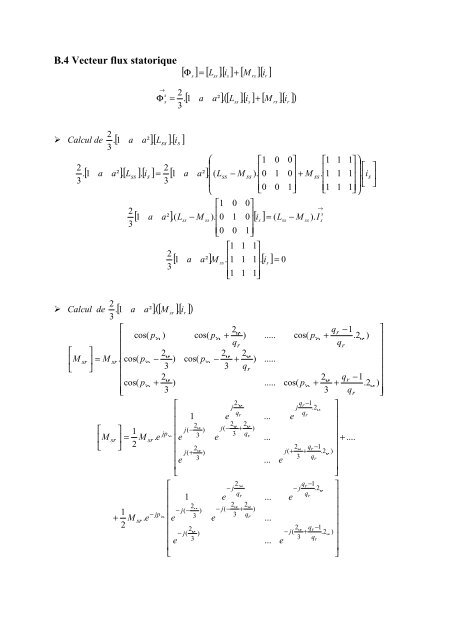
B.4 Vecteur flux statorique<br />
→<br />
s<br />
s<br />
Φ<br />
2<br />
= .<br />
3<br />
2<br />
Calcul <strong>de</strong> . [ 1 a a²<br />
][ . Lss<br />
][ . is<br />
]<br />
3<br />
2<br />
.<br />
3<br />
2<br />
[ Φ ] = [ L ][ . i ] + [ M ][ . i ]<br />
s<br />
ss<br />
s<br />
[ 1 a a²<br />
] . ( [ L ][ . i ] + [ M ][ . i ] )<br />
⎛<br />
⎜<br />
[ 1 a a²<br />
][ . Lss<br />
][ . is<br />
] = [ 1 a a²<br />
] . ⎜(<br />
Lss<br />
− M ss ).<br />
⎢<br />
0 1 0<br />
⎥<br />
+ M ss.<br />
⎢<br />
1 1 1<br />
⎥⎟.<br />
⎢is<br />
⎥<br />
3 ⎜<br />
⎟ ⎣ ⎦<br />
2<br />
3<br />
ss<br />
s<br />
rs<br />
r<br />
⎡1<br />
⎢<br />
[ 1 a²<br />
] .( L − M ). 0 1 0 [ i ]<br />
rs<br />
0<br />
r<br />
0⎤<br />
⎥<br />
⎝<br />
⎢⎣<br />
0 0 1⎥⎦<br />
a ss ss<br />
⎡1<br />
⎢<br />
⎢<br />
⎢⎣<br />
0<br />
0<br />
0<br />
0⎤<br />
⎥<br />
⎥<br />
1⎥⎦<br />
s = ( Lss<br />
− M ss ).<br />
2<br />
[ 1<br />
3<br />
a<br />
⎡1<br />
a²<br />
] M .<br />
⎢<br />
ss ⎢<br />
1<br />
⎢⎣<br />
1<br />
1<br />
1<br />
1<br />
1⎤<br />
1<br />
⎥<br />
⎥<br />
. [ is<br />
] = 0<br />
1⎥⎦<br />
2<br />
Calcul <strong>de</strong> . [ 1<br />
3<br />
a a²<br />
] . ( [ M sr ][ . ir<br />
] )<br />
⎡<br />
⎢ cos( p.<br />
θ )<br />
⎢<br />
⎡ ⎤ ⎢ 2π<br />
⎢M<br />
sr ⎥ = M sr . cos( p.<br />
θ − )<br />
⎢<br />
⎣ ⎦<br />
3<br />
⎢<br />
⎢<br />
2π<br />
cos( p.<br />
θ + )<br />
⎢⎣<br />
3<br />
2π<br />
cos( p.<br />
θ + )<br />
qr<br />
2π<br />
2π<br />
cos( p.<br />
θ − + )<br />
3 qr<br />
⎡<br />
⎢ 1<br />
⎢ 2π<br />
⎡ ⎤ 1<br />
( )<br />
. ⎢ j −<br />
jp θ<br />
.<br />
3<br />
⎢M<br />
sr ⎥ = M sr e<br />
2<br />
⎢e<br />
⎣ ⎦<br />
⎢ 2π<br />
j(<br />
+ )<br />
⎢e<br />
3<br />
⎢<br />
⎣<br />
2.<br />
π<br />
j<br />
q<br />
e r<br />
2π<br />
2π<br />
j(<br />
− + )<br />
3 q<br />
e<br />
r<br />
⎡<br />
⎢ 1<br />
⎢ 2π<br />
1 ⎢ − j(<br />
− )<br />
− jp.<br />
θ<br />
+ M<br />
3<br />
sr . e ⎢e<br />
2<br />
⎢ 2π<br />
− j(<br />
)<br />
⎢ e 3<br />
⎢<br />
⎣<br />
2.<br />
π<br />
− j<br />
q<br />
e r<br />
2π<br />
2π<br />
− j(<br />
− + )<br />
3 q<br />
e<br />
r<br />
→<br />
s<br />
I s<br />
⎡1<br />
⎢<br />
⎢⎣<br />
1<br />
1<br />
1<br />
1⎤<br />
⎞<br />
⎥⎟<br />
⎡<br />
1⎥⎦<br />
⎠<br />
.....<br />
.....<br />
.....<br />
qr<br />
−1<br />
⎤<br />
cos( p.<br />
θ + . 2π<br />
) ⎥<br />
qr<br />
⎥<br />
⎥<br />
⎥<br />
2π<br />
q −1<br />
⎥<br />
r<br />
cos( p.<br />
θ + + . 2π<br />
) ⎥<br />
3 qr<br />
⎥⎦<br />
...<br />
...<br />
...<br />
qr<br />
−1<br />
j . 2π<br />
⎤<br />
q<br />
e r ⎥<br />
⎥<br />
⎥<br />
⎥ + ....<br />
2π<br />
qr<br />
−1<br />
j(<br />
+ + . 2π<br />
) ⎥<br />
3 q<br />
e<br />
r ⎥<br />
⎥<br />
⎦<br />
...<br />
...<br />
...<br />
qr<br />
−1<br />
− j . 2π<br />
⎤<br />
q<br />
e r ⎥<br />
⎥<br />
⎥<br />
⎥<br />
2π<br />
qr<br />
−1<br />
− j(<br />
+ . 2π<br />
) ⎥<br />
3 q<br />
e<br />
r ⎥<br />
⎥<br />
⎦<br />
⎤