

Identification des mécanismes de fissuration dans un alliage d ...
Identification des mécanismes de fissuration dans un alliage d ...
Identification des mécanismes de fissuration dans un alliage d ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.1 Caractérisation <strong>de</strong> l’amorçage en fretting 77<br />
Force normale [N/mm]<br />
700<br />
600<br />
500<br />
400<br />
300<br />
200<br />
100<br />
auc<strong>un</strong>e<br />
fissure<br />
observée<br />
<br />
•<br />
•<br />
<br />
•<br />
•<br />
• •<br />
• • •<br />
<br />
•<br />
•<br />
•<br />
<br />
0<br />
0 10 20 30 40 50<br />
Débattement δ ∗ [µm]<br />
•<br />
•<br />
•<br />
<br />
fissure<br />
observée<br />
l > 5µm<br />
•<br />
•<br />
•<br />
<br />
<br />
<br />
<br />
<br />
régime <strong>de</strong><br />
glissement total<br />
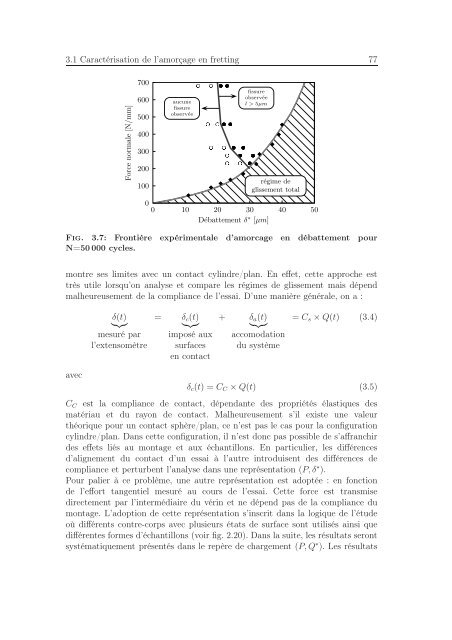
Fig. 3.7: Frontière expérimentale d’amorcage en débattement pour<br />
N=50000 cycles.<br />
montre ses limites avec <strong>un</strong> contact cylindre/plan. En effet, cette approche est<br />
très utile lorsqu’on analyse et compare les régimes <strong>de</strong> glissement mais dépend<br />
malheureusement <strong>de</strong> la compliance <strong>de</strong> l’essai. D’<strong>un</strong>e manière générale, on a :<br />
δ(t)<br />
}{{}<br />
mesuré par<br />
l’extensomètre<br />
= δ c (t)<br />
}{{}<br />
imposé aux<br />
surfaces<br />
en contact<br />
+ δ a (t)<br />
}{{}<br />
accomodation<br />
du système<br />
= C s × Q(t) (3.4)<br />
avec<br />
δ c (t) = C C × Q(t) (3.5)<br />
C C est la compliance <strong>de</strong> contact, dépendante <strong><strong>de</strong>s</strong> propriétés élastiques <strong><strong>de</strong>s</strong><br />
matériau et du rayon <strong>de</strong> contact. Malheureusement s’il existe <strong>un</strong>e valeur<br />
théorique pour <strong>un</strong> contact sphère/plan, ce n’est pas le cas pour la configuration<br />
cylindre/plan. Dans cette configuration, il n’est donc pas possible <strong>de</strong> s’affranchir<br />
<strong><strong>de</strong>s</strong> effets liés au montage et aux échantillons. En particulier, les différences<br />
d’alignement du contact d’<strong>un</strong> essai à l’autre introduisent <strong><strong>de</strong>s</strong> différences <strong>de</strong><br />
compliance et perturbent l’analyse <strong>dans</strong> <strong>un</strong>e représentation (P, δ ∗ ).<br />
Pour palier à ce problème, <strong>un</strong>e autre représentation est adoptée : en fonction<br />
<strong>de</strong> l’effort tangentiel mesuré au cours <strong>de</strong> l’essai. Cette force est transmise<br />
directement par l’intermédiaire du vérin et ne dépend pas <strong>de</strong> la compliance du<br />
montage. L’adoption <strong>de</strong> cette représentation s’inscrit <strong>dans</strong> la logique <strong>de</strong> l’étu<strong>de</strong><br />
où différents contre-corps avec plusieurs états <strong>de</strong> surface sont utilisés ainsi que<br />
différentes formes d’échantillons (voir fig. 2.20). Dans la suite, les résultats seront<br />
systématiquement présentés <strong>dans</strong> le repère <strong>de</strong> chargement (P, Q ∗ ). Les résultats














