Campos de Vetores Polinomiais Planares: Análise ... - Unesp
Campos de Vetores Polinomiais Planares: Análise ... - Unesp
Campos de Vetores Polinomiais Planares: Análise ... - Unesp

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Segue <strong>de</strong>ste teorema que se p e q começam com termos <strong>de</strong> grau um, isto é,<br />
p 1 (x, y) = ax + by e q 1 (x, y) = cx + dy<br />
com a, b, c, d ≠ 0, então as únicas direções possíveis na qual as trajetórias po<strong>de</strong>m se afastar da<br />
origem são dadas por direções que satisfazem<br />
bsen 2 θ + (a − d)senθcosθ − acos 2 θ = 0. (2.9)<br />
Para cosθ ≠ 0, isto é, se b ≠ 0, esta equação é equivalente a<br />
btg 2 θ + (a − d)tgθ − c = 0. (2.10)<br />
Esta equação tem ao menos duas soluções θ ∈ ( −π<br />
2 , π 2<br />
]<br />
e se θ = θ1 é uma solução, então<br />
θ = θ 1 ± π também são soluções. Encontrar as soluções <strong>de</strong> (2.10) é equivalente a encontrar as<br />
direções <strong>de</strong>terminadas pelos autovetores da matriz<br />
A =<br />
[<br />
a<br />
c<br />
O próximo teorema segue imediatamente do Teorema da Varieda<strong>de</strong> Estável e do Teorema <strong>de</strong><br />
Grobman-Hartman. Ele estabelece que se a origem é um ponto hiperbólico para o sistema não<br />
linear (2.5), então existe uma sela topológica para (2.5) se, e somente se, é uma sela para a sua<br />
linearização na origem. Além disso, as direções θ j ao longo <strong>de</strong> cada separatriz γ j que se afasta<br />
da origem são soluções <strong>de</strong> (2.9).<br />
Teorema 2.16. Seja X : R 2 → R 2 um campo polinomial vetorial do sistema não linear (2.5),<br />
com a origem sendo uma singularida<strong>de</strong> hiperbólica. Então a origem é uma sela topológica para<br />
(2.5) se, e somente se, a origem é uma sela para o sistema linear (2.4) com A = JX(0, 0).<br />
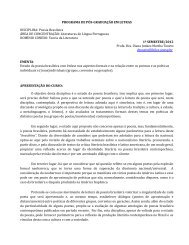
Exemplo 2.17. De acordo com o teorema anterior, a origen é uma sela topológica ou uma sela<br />
b<br />
d<br />
]<br />
.<br />
para o sistema não linear {<br />
ẋ = x + 2y + x 2 − y 2<br />
ẏ = 3x + 4y − 2xy<br />
visto que o <strong>de</strong>terminante da parte linear é −2. Além disso, as direções nas quais as separatrizes<br />
se aproximam da origem quando t → ±∞ são dados pelas soluções <strong>de</strong> (2.10):<br />
2tg 2 θ − 3tgθ − 3 = 0<br />
55