

Download - Academy Publisher
Download - Academy Publisher
Download - Academy Publisher

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ISBN 978-952-5726-09-1 (Print)<br />
Proceedings of the Second International Symposium on Networking and Network Security (ISNNS ’10)<br />
Jinggangshan, P. R. China, 2-4, April. 2010, pp. 097-100<br />
Fuzzy Control of Intelligent Vehicle Based on<br />
Visual Navigation System<br />
Tingjian Zhong 1 , and Meilian Qiu 2<br />
1<br />
Jiangxi Vocational & Technical College of Electricity, Nanchang, China<br />
Email:jxdlztj@163.com<br />
2<br />
Nanchang Power Supply Company, Nanchang, China<br />
Email:qiuqiu6872@163.com<br />
Abstract—The research on intelligent vehicle mainly<br />
includes safety monitoring, intelligent anticollision, aided<br />
driving, auto driving, behavior planning decision-making,<br />
system structure, and synthetical integration, etc. Sensor<br />
and control algorithm are major factors influencing the<br />
development of intelligent vehicle. This paper introduces an<br />
intelligent vehicle system with chip of FRSSCALE<br />
MC9SDG128. By adding fuzzy algorithm into this research<br />
on turning control angle of intelligent vehicle, it makes<br />
decision according to the lateral error and orientation error.<br />
This system, which includes automatic recognition and<br />
finished special function, is simple and useful, lower<br />
requirement to hardware and has capability of adapting<br />
existing structured road environment.<br />
these following main factors should be considered: first,<br />
hardware requires good reliability; second, use real-time<br />
processing of visual-guided high-speed method to lead<br />
the camera image for information collection; In addition,<br />
it should determine the performance of the sensor<br />
correctly to meet the requirements of intelligent vehicle<br />
functions.<br />
Index Terms—Intelligent vehicle, path tracking, fuzzy<br />
control<br />
I. INTRODUCTION<br />
Intelligent vehicle, which is also called wheel Mobil<br />
Robot, is a synthetical system [1][2] that contains<br />
environmental perception, planning and decision-making,<br />
auto-driving and other functions. Intelligent vehicle<br />
involves many fields, such as computer science,<br />
communications, artificial intelligence, signal processing,<br />
pattern recognition, control theory and so on. Intelligent<br />
vehicle has a wide range of applications prospect in areas<br />
such as the military, civil and scientific research. It has<br />
attracted the attention of large companies and<br />
governments. From the mid-and late eighties last century,<br />
the world’s major developed countries have launched a<br />
series of research and have effective development on<br />
intelligent vehicle. Road detection technology is not only<br />
as an important key technologies, but also as an important<br />
indication of the level in intelligent vehicle visual<br />
navigation system. This paper focuses on intelligent<br />
vehicle control system in terms of speed, looking for line<br />
control. Based on the traditional idea of fuzzy control, in<br />
accordance with the specific requirements of the process<br />
of the intelligent vehicle speed, line regulation, and speed<br />
of the actual situation, a fuzzy parameter self-tuning<br />
fuzzy control method is introduced. Experimental results<br />
show that this method is suitable for intelligent vehicle<br />
for speed and line-conditioning.<br />
II. INTELLIGENT VEHICLE DESIGN PROGRAM<br />
Hardware design of controller not only affects the<br />
overall performance of the intelligent vehicle, but also<br />
related to the manufacturing cost. While choose hardware,<br />
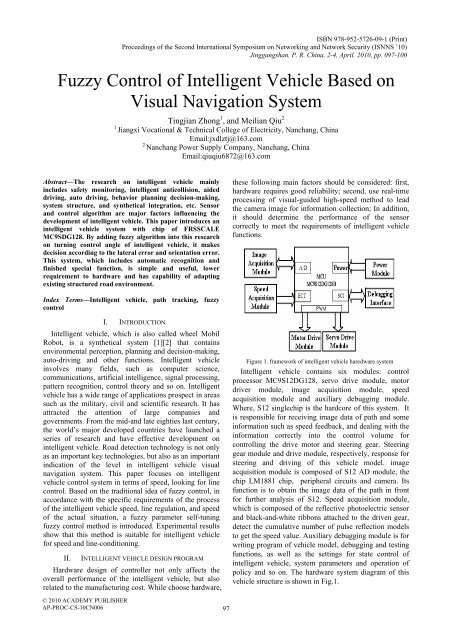
Figure 1. framework of intelligent vehicle haredware system<br />
Intelligent vehicle contains six modules: control<br />
processor MC9S12DG128, servo drive module, motor<br />
driver module, image acquisition module, speed<br />
acquisition module and auxiliary debugging module.<br />
Where, S12 singlechip is the hardcore of this system. It<br />
is responsible for receiving image data of path and some<br />
information such as speed feedback, and dealing with the<br />
information correctly into the control volume for<br />
controlling the drive motor and steering gear. Steering<br />
gear module and drive module, respectively, response for<br />
steering and driving of this vehicle model. image<br />
acquisition module is composed of S12 AD module, the<br />
chip LM1881 chip, peripheral circuits and camera. Its<br />
function is to obtain the image data of the path in front<br />
for further analysis of S12. Speed acquisition module,<br />
which is composed of the reflective photoelectric sensor<br />
and black-and-white ribbons attached to the driven gear,<br />
detect the cumulative number of pulse reflection models<br />
to get the speed value. Auxiliary debugging module is for<br />
writing program of vehicle model, debugging and testing<br />
functions, as well as the settings for state control of<br />
intelligent vehicle, system parameters and operation of<br />
policy and so on. The hardware system diagram of this<br />
vehicle structure is shown in Fig.1.<br />
© 2010 ACADEMY PUBLISHER<br />
AP-PROC-CS-10CN006<br />
97













