

Download - Academy Publisher
Download - Academy Publisher
Download - Academy Publisher

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
oth α and β .<br />
determination of Quantitative factor and proportion<br />
factor: Choose { − 6,<br />
−5,<br />
−4,<br />
−3,<br />
−2,<br />
−1,0,1,2,3,4,5,6<br />
} as fuzzy<br />
domains of e 、 α 、 β on the consider of Real-time<br />
performance and complexity of control. Fuzzy domain {-<br />
n,+n} is the discretization error of continuous change in<br />
basic domain {-m,+m}. Where, quantitative factor<br />
k = n / m , and the basic domain of location error e is [-<br />
15 , +15]. Then quantitative factor of location error<br />
k e = 6 /15 = 2 / 5 . For system controlled object β , whose<br />
°<br />
domain is [ − 45 ° , + 45 ], this proportion factor of location<br />
error k β = 6 / 45 = 2/ 15 .<br />
Selection of fuzzy linguistic variables and its fuzzy<br />
subsets: According to system’s actual circumstance,<br />
linguistic variables are dicided into seven values as<br />
“positive big”(PB), “positive middle”(PM), “positive<br />
small”(PS), “zero” (ZO), “negative small”(NS),<br />
“negative middle”(NM) and “negative big”(NB). Fuzzy<br />
subsets of linguistic variables’ domain are discribed with<br />
subjection function μ ( x)<br />
. For a domain<br />
{ − 6,<br />
−5,<br />
−4,<br />
−3,<br />
−2,<br />
−1,0,1,2,3,4,5,6<br />
}, of fuzzy subsets on those<br />
seven defined linguistic variables PB, PM, PS, ZO, NS,<br />
NM and NB, the values of maximum subjection “1” is<br />
set as follow.<br />
μ PB( X ) = 1 X = 6<br />
μ PM ( X ) = 1 X = 4<br />
μ PS ( X ) = 1 X = 2<br />
μ Z 0 ( X ) = 1<br />
X = 0<br />
μ NS ( X ) = 1 X = −2<br />
μ NM ( X ) = 1<br />
X = −4<br />
μ NB ( X ) = 1 X = −6<br />
Things are tended to be judged as the characteristic of<br />
normal distribution, so the subjection function of fuzzy<br />
set is dicided with normal distribution.<br />
( )<br />
⎟ ⎟ ⎞<br />
⎜<br />
⎜ ⎛<br />
2<br />
⎛ x − a ⎞<br />
μ x = exp − ⎜ ⎟ (1)<br />
⎝<br />
⎝ b ⎠<br />
⎠<br />
Where, parameter a represents respectively 6, 4, 2, 0,<br />
-2, -4, -6 for the fuzzy sets PB, PM, PS, ZO, NS, NM,<br />
NB. Parameter b is chosen positive which is bigger than<br />
0. The value of a has greater impact on the control. The<br />
bigger value of b , the wider μ ( x)<br />
diagram, the lower<br />
resolution characteristics and error control sensitivity. On<br />
the contrary, smaller value of b will be together with<br />
thiner μ ( x)<br />
diagram, better resolution characteristics and<br />
error control sensitivity. Therefore, choose the fuzzy sets<br />
with low resolution characteristics subjection function<br />
while in big system error. With small system error or even<br />
near 0, fuzzy sets of high resolution characteristics<br />
subjection function is adopted, and b is 1 here.<br />
For a integer domain N, these linguistic variables can<br />
be represented with different ways, such as the method of<br />
table, formula or graphics and so on. If the Gaussian<br />
subjection function is chosen to transform fuzzy linguistic<br />
variables value of input and output, the values of the<br />
linguistic variables above are shown as in table 1.<br />
According to pre-given inputs e i and α i , as well as its<br />
quantitative factor, gain the quantitative level of e i and<br />
TABLE I.<br />
assignment table of linguistic variable value<br />
α i in basic domain from n ie = ke<br />
× ei<br />
and niα = kα<br />
× αi<br />
.<br />
From linguistic variables transforming table, identify the<br />
fuzzy set of the element n i on biggest subjection<br />
corresponding linguistic value. This fuzzy set is right the<br />
fuzzification of input value.<br />
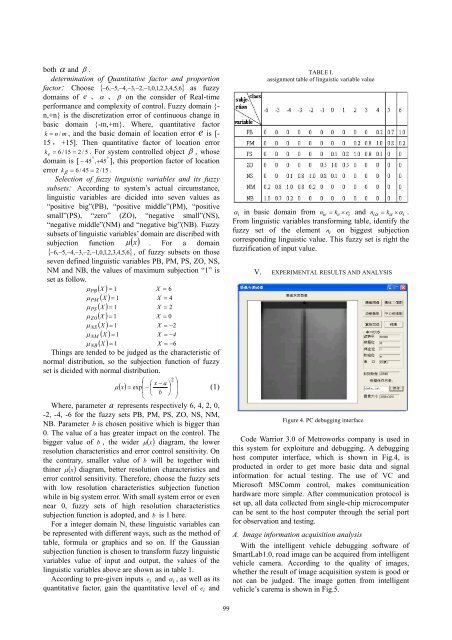
V. EXPERIMENTAL RESULTS AND ANALYSIS<br />
Figure 4. PC debugging interface<br />
Code Warrior 3.0 of Metroworks company is used in<br />
this system for exploiture and debugging. A debugging<br />
host computer interface, which is shown in Fig.4, is<br />
producted in order to get more basic data and signal<br />
information for actual testing. The use of VC and<br />
Microsoft MSComm control, makes communication<br />
hardware more simple. After communication protocol is<br />
set up, all data collected from single-chip microcomputer<br />
can be sent to the host computer through the serial port<br />
for observation and testing.<br />
A. Image information acquisition analysis<br />
With the intelligent vehicle debugging software of<br />
SmartLab1.0, road image can be acquired from intelligent<br />
vehicle camera. According to the quality of images,<br />
whether the result of image acquisition system is good or<br />
not can be judged. The image gotten from intelligent<br />
vehicle’s carema is shown in Fig.5.<br />
99













