

Download - Academy Publisher
Download - Academy Publisher
Download - Academy Publisher

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ISBN 978-952-5726-09-1 (Print)<br />
Proceedings of the Second International Symposium on Networking and Network Security (ISNNS ’10)<br />
Jinggangshan, P. R. China, 2-4, April. 2010, pp. 085-088<br />
Swarm Dynamics Behavior Analysis and<br />
Coordinated Control of Limited-Range Perceived<br />
Agents<br />
Zhibin Xue 1*,3 , and Jianchao Zeng 2<br />
1 Department of chemical machinery, Chemical engineering college, Qinghai University, Xining, China<br />
Email: zbxue_jack@163.com<br />
2 Complex System & Computer Intelligence Laboratory; Taiyuan University of Science & Technology, Taiyuan, China<br />
Email: zengjianchao@263.net<br />
3 College of Electric & Information Engineering, Lanzhou University of Technology, Lanzhou, China<br />
Abstract—Swarming behavior is ubiquitous in nature and<br />
society. It is of both theoretical and practical importance to<br />
investigate the underlying principles and mechanisms of<br />
coordination and cooperation emerging in swarms. In this<br />
paper we propose a simple isotropic range limited-perceive<br />
agents dynamic model to study collective and formation<br />
behavior of a group of mobile autonomous agents<br />
interacting through a long range attraction and short range<br />
repulsion function. It is shown that the individuals (agents)<br />
in the swarm during the course of coordinative motion can<br />
realize the local collision-free stabilization of constituting a<br />
particular predefined geometrical configuration. Numerical<br />
simulations are also worked out to illustrate the analytical<br />
results.<br />
Index Terms—swarm dynamics, coordinated control,<br />
isotropic, limited-range perceive, multi-agent, collision-free,<br />
formation control, numerical simulations<br />
I. INTRODUCTION<br />
Swarming behavior has been observed in nature. For<br />
example, bees, ants and birds often work together in<br />
groups for viability[1]. It is known that such cooperative<br />
behavior has certain advantages, for example, predator<br />
avoidance, foraging success and so on.<br />
The general understanding in biology is that the<br />
swarming behavior is a result of an interplay between a<br />
long range attraction and a short range repulsion between<br />
the individuals [1]. Understanding the cooperative and<br />
operational principles of such systems may provide useful<br />
ideas for modeling and exploring the collective dynamics<br />
of swarming behavior in bionics for using in engineering<br />
applications, such as the coordinated control of multiagent<br />
systems.<br />
However, most available results in the literature are on<br />
the isotropic global perceive swarming model, convincing<br />
results on the isotropic local perceive swarming model<br />
are relatively few. Based on the analysis of various<br />
biological swarms of dynamic aggregation mechanism,<br />
an isotropic limited-range perceived swarming dynamic<br />
model is proposed in this paper. Meanwhile, the chief<br />
research objective of the paper is to use the limited range<br />
perceive model to solve the formation control question of<br />
multi-agent systems to constitute various predefined<br />
geometrical configuration formations pattern on multiagent<br />
systems in an n-dimensional Euclidean space by<br />
using artificial potential functions and Newton’s iteration<br />
method. Dynamic change of the environment, local<br />
observation and nonlinear characteristics are ubiquitous<br />
phenomena in nature, but the study is very difficult and it<br />
has profound engineering significance. So this article is<br />
able to provide some results on this topic.<br />
II. SWARM DYNAMICAL MODELS<br />
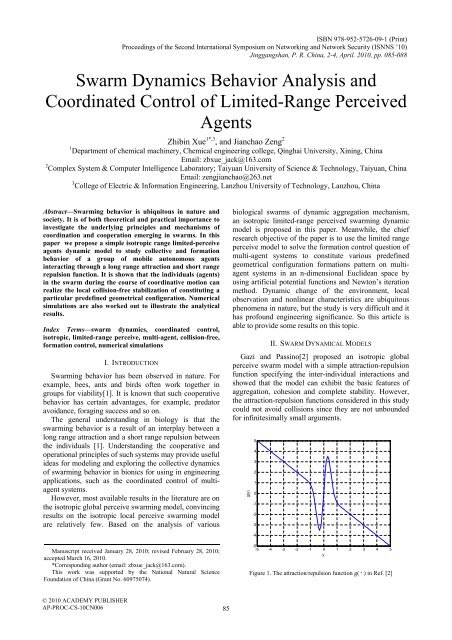
Gazi and Passino[2] proposed an isotropic global<br />
perceive swarm model with a simple attraction-repulsion<br />
function specifying the inter-individual interactions and<br />
showed that the model can exhibit the basic features of<br />
aggregation, cohesion and complete stability. However,<br />
the attraction-repulsion functions considered in this study<br />
could not avoid collisions since they are not unbounded<br />
for infinitesimally small arguments.<br />
g(y)<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
Manuscript received January 28, 2010; revised February 28, 2010;<br />
accepted March 16, 2010.<br />
*Corresponding author (email: zbxue_jack@163.com).<br />
This work was supported by the National Natural Science<br />
Foundation of China (Grant No. 60975074).<br />
-5<br />
-5 -4 -3 -2 -1 0 1 2 3 4 5<br />
y<br />
Figure 1. The attraction/repulsion function g(⋅ ) in Ref. [2]<br />
© 2010 ACADEMY PUBLISHER<br />
AP-PROC-CS-10CN006<br />
85













