Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
- TAGS
- invariantes
- impa
- www.impa.br

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Capítulo 5. Geometria Afim: Superfícies 105<br />
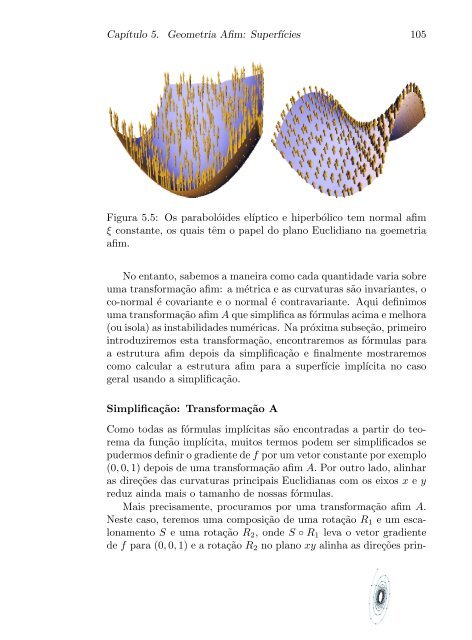
Figura 5.5: Os parabolói<strong>de</strong>s elíptico e hiperbólico tem normal afim<br />
ξ constante, os quais têm o papel do plano Euclidiano na goemetria<br />
afim.<br />
No entanto, sabemos a maneira como cada quantida<strong>de</strong> varia sobre<br />
uma transformação afim: a métrica e as curvaturas são invariantes, o<br />
co-normal é covariante e o normal é contravariante. Aqui <strong>de</strong>finimos<br />
uma transformação afim A que simplifica as fórmulas acima e melhora<br />
(ou isola) as instabilida<strong>de</strong>s numéricas. Na próxima subseção, primeiro<br />
introduziremos esta transformação, encontraremos as fórmulas para<br />
a estrutura afim <strong>de</strong>pois da simplificação e finalmente mostraremos<br />
como calcular a estrutura afim para a superfície implícita no caso<br />
geral usando a simplificação.<br />
Simplificação: Transformação A<br />
Como todas as fórmulas implícitas são encontradas a partir do teorema<br />
da função implícita, muitos termos po<strong>de</strong>m ser simplificados se<br />
pu<strong>de</strong>rmos <strong>de</strong>finir o gradiente <strong>de</strong> f por um vetor constante por exemplo<br />
(0, 0, 1) <strong>de</strong>pois <strong>de</strong> uma transformação afim A. Por outro lado, alinhar<br />
as direções das curvaturas principais Euclidianas com os eixos x e y<br />
reduz ainda mais o tamanho <strong>de</strong> nossas fórmulas.<br />
Mais precisamente, procuramos por uma transformação afim A.<br />
Neste caso, teremos uma composição <strong>de</strong> uma rotação R1 e um escalonamento<br />
S e uma rotação R2, on<strong>de</strong> S ◦ R1 leva o vetor gradiente<br />
<strong>de</strong> f para (0, 0, 1) e a rotação R2 no plano xy alinha as direções prin-