Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
- TAGS
- invariantes
- impa
- www.impa.br

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
52 3.5. Segunda Forma Fundamental<br />
$<br />
#" &"<br />
!"<br />
' %"<br />
%"<br />
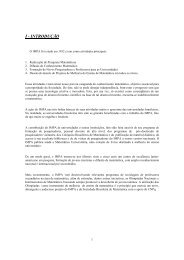
Figura 3.12: Curvatura normal.<br />
'%"<br />
A curvatura normal <strong>de</strong> C não <strong>de</strong>pen<strong>de</strong> da orientação <strong>de</strong> C, mas<br />
troca <strong>de</strong> sinal com uma mudança <strong>de</strong> orientação da superfície.<br />
Po<strong>de</strong>mos dar uma interpretação geométrica da segunda forma fundamental<br />
IIp utilizando a curvatura normal. De fato, seja C ⊂ S uma<br />
curva parametrizada pelo comprimento <strong>de</strong> arco α(s), com α(0) = p.<br />
Se indicarmos por N(s) a restrição do vetor normal N à curva α(s),<br />
teremos IIp(α ′ (0)) = κn(p).<br />
Exercício 3.33. Com a notação acima, prove que a segunda forma<br />
fundamental verifica IIp(α ′ (0)) = κn(p).<br />
Como dNp é uma aplicação auto-adjunta sabemos pelo teorema<br />
espectral que existe uma base {e1, e2} ortonormal <strong>de</strong> TpS tal que<br />
dNp(e1) = −k1e1 e dNp(e2) = −k2e2.<br />
Definição 3.34. O máximo k1 da curvatura e o mínimo k2 da curvatura<br />
são chamadas curvaturas principais em p; as direções correspon<strong>de</strong>ntes,<br />
isto é, as direções dadas pelos autovalores e1 e e2 são<br />
chamadas direções principais em p.