Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
Cálculo e Estimação de Invariantes Geométricos: Uma ... - Impa
- TAGS
- invariantes
- impa
- www.impa.br

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
106 5.5. Superfícies Implícitas<br />
cipais aos eixos. Como consequência garantimos que fxy = 0, o que<br />
simplifica o processo <strong>de</strong> obtenção dos invariantes afins. O efeito <strong>de</strong>sta<br />
transformação sobre as <strong>de</strong>rivadas é <strong>de</strong>scrita no seguinte teorema e a<br />
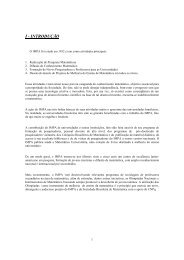
construção <strong>de</strong> A (ver Figura 5.6) é <strong>de</strong>talhada na sua <strong>de</strong>monstração.<br />
x<br />
p<br />
f(x,y,z)=0<br />
~ x<br />
z~<br />
~ p<br />
z<br />
∆<br />
f~<br />
∆<br />
f<br />
~ y<br />
y<br />
~<br />
f(x,y,z)=0<br />
A = R2SR1<br />
R1<br />
Figura 5.6: A construção da transformação A.<br />
R2<br />
S<br />
x R<br />
x S<br />
z R<br />
p R<br />
z S<br />
∆<br />
R<br />
f<br />
y R<br />
f R (x,y,z)=0<br />
p S<br />
∆<br />
S<br />
f<br />
y S<br />
f S (x,y,z)=0<br />
Teorema � 5.12. Em � cada ponto regular p <strong>de</strong> uma superfície implícita<br />
3 p ∈ R , f(p) = 0 existe uma transformação equiafim A tal que em<br />
cada � ponto ˜p = A(p) a superfície implícita transformada <strong>de</strong>finida por<br />
˜p ∈ R3 , ˜ f(˜p) = f � A−1 (˜p) � �<br />
= 0 tem as seguintes proprieda<strong>de</strong>s<br />
• O vetor gradiente é o vetor unitário vertical: ∇ ˜ f(˜p) = (0, 0, 1).<br />
• A <strong>de</strong>rivada cruzada ˜ fxy zera, ou seja, ˜ fxy(˜p) = 0.<br />
Demonstração: Primeiro observe que ∇ ˜ f(˜p) = ∇f(p) · A−1 (escrevendo<br />
o gradiente em linha). Deduzimos as transformações para o<br />
primeiro item com a geometria <strong>de</strong>scritiva simples. Decompomos a<br />
transformação afim como A = R2SR1 (ver Figura 5.6), on<strong>de</strong> R1 é a<br />
rotação em R3 , S é um escalonamento não-uniforme ao longo <strong>de</strong> z e<br />
do plano xy e R2 é uma rotação no plano xy. A rotação R1 é uma<br />
aplicação <strong>de</strong> rotação <strong>de</strong> ∇f(p) para o vetor vertical ( 0, 0, ||∇f(p) || ) .<br />
Denotemos por f R a função implícita transformada que é dada por<br />
f R (p) = f � R −1<br />
1 (p)� . Verifica-se que o vetor gradiente <strong>de</strong> f R é<br />
� R<br />
∇f �T −T<br />
= R1 (∇f) T = R1(∇f) T = ( 0, 0, ||∇f(p) || ) T .