

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3- L’entraînement<br />
3-4- Les moteurs<br />
■■k est une constante (sans unité) propre au moteur,<br />
■ ■w la vitesse angulaire en radians par secon<strong>de</strong>,<br />
■ ■f le flux en webers.<br />
Cette relation montre qu’à flux constant, la force contre-électromotrice E,<br />
proportionnelle à w, est une image <strong>de</strong> la vitesse. Le couple est lié au flux et<br />
au courant dans l’in<strong>du</strong>it par la relation C= k I f, dans laquelle :<br />
■■k est une constante (sans unité) propre au moteur,<br />
■■I le courant d’in<strong>du</strong>it en ampère,<br />
■ ■f le flux en webers.<br />
Avec ces unités, la constante <strong>de</strong> vitesse et la constante <strong>de</strong> couple sont i<strong>de</strong>ntiques.<br />
Dans les catalogues constructeurs, on trouvera <strong>de</strong>ux unités différentes :<br />
■■une constante <strong>de</strong> tension en Volts/tour par minute,<br />
■■une constante <strong>de</strong> couple en mN/A.<br />
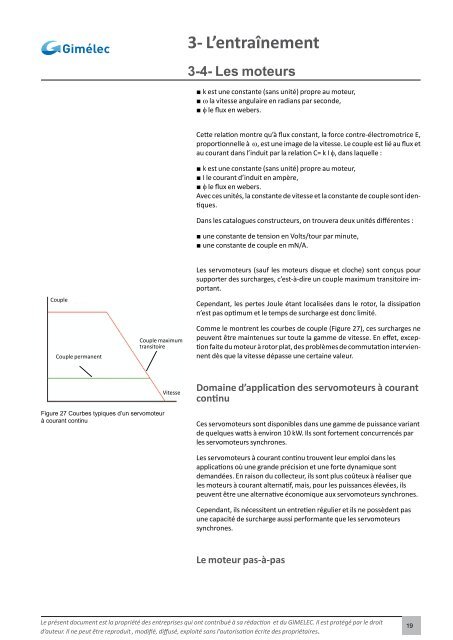
Couple<br />
Couple permanent<br />
Couple maximum<br />
transitoire<br />
Les servomoteurs (sauf les moteurs disque et cloche) sont conçus pour<br />
supporter <strong>de</strong>s surcharges, c’est-à-dire un couple maximum transitoire important.<br />
Cependant, les pertes Joule étant localisées dans le rotor, la dissipation<br />
n’est pas optimum et le temps <strong>de</strong> surcharge est donc limité.<br />
Comme le montrent les courbes <strong>de</strong> couple (Figure 27), ces surcharges ne<br />
peuvent être maintenues sur toute la gamme <strong>de</strong> vitesse. En effet, exception<br />
faite <strong>du</strong> moteur à rotor plat, <strong>de</strong>s problèmes <strong>de</strong> commutation interviennent<br />
dès que la vitesse dépasse une certaine valeur.<br />
Vitesse<br />
Domaine d’application <strong>de</strong>s servomoteurs à courant<br />
continu<br />
Figure 27 Courbes typiques d’un servomoteur<br />
à courant continu<br />
Ces servomoteurs sont disponibles dans une gamme <strong>de</strong> puissance variant<br />
<strong>de</strong> quelques watts à environ 10 kW. Ils sont fortement concurrencés par<br />
les servomoteurs synchrones.<br />
Les servomoteurs à courant continu trouvent leur emploi dans les<br />
applications où une gran<strong>de</strong> précision et une forte dynamique sont<br />
<strong>de</strong>mandées. En raison <strong>du</strong> collecteur, ils sont plus coûteux à réaliser que<br />
les moteurs à courant alternatif, mais, pour les puissances élevées, ils<br />
peuvent être une alternative économique aux servomoteurs synchrones.<br />
Cependant, ils nécessitent un entretien régulier et ils ne possè<strong>de</strong>nt pas<br />
une capacité <strong>de</strong> surcharge aussi performante que les servomoteurs<br />
synchrones.<br />
Le moteur pas-à-pas<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.<br />
19













