

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3- L’entraînement<br />
1-4- Les moteurs<br />
V<br />
jXIq<br />
Iq<br />
q<br />
E<br />
<br />
RI<br />
jXId<br />
Id<br />
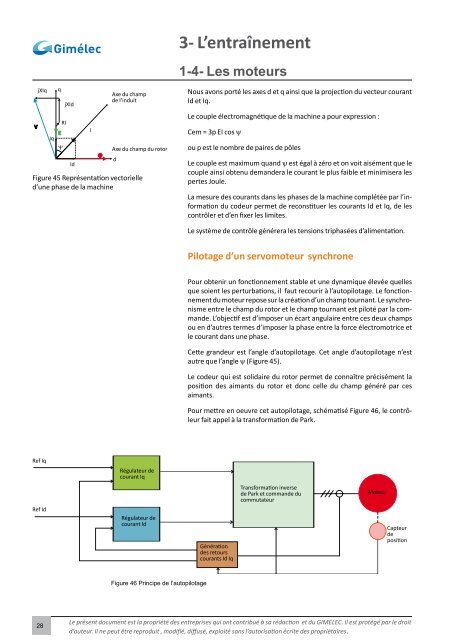
Figure 45 Représentation vectorielle<br />
d’une phase <strong>de</strong> la machine<br />
I<br />
<br />
Axe <strong>du</strong> champ<br />
<strong>de</strong> l’in<strong>du</strong>it<br />
Axe <strong>du</strong> champ <strong>du</strong> rotor<br />
d<br />
Nous avons porté les axes d et q ainsi que la projection <strong>du</strong> vecteur courant<br />
Id et Iq.<br />
Le couple électromagnétique <strong>de</strong> la machine a pour expression :<br />
Cem = 3p EI cos y<br />
ou p est le nombre <strong>de</strong> paires <strong>de</strong> pôles<br />
Le couple est maximum quand y est égal à zéro et on voit aisément que le<br />
couple ainsi obtenu <strong>de</strong>man<strong>de</strong>ra le courant le plus faible et minimisera les<br />
pertes Joule.<br />
La mesure <strong>de</strong>s courants dans les phases <strong>de</strong> la machine complétée par l’information<br />
<strong>du</strong> co<strong>de</strong>ur permet <strong>de</strong> reconstituer les courants Id et Iq, <strong>de</strong> les<br />
contrôler et d’en fixer les limites.<br />
Le système <strong>de</strong> contrôle générera les tensions triphasées d’alimentation.<br />
Pilotage d’un servomoteur synchrone<br />
Pour obtenir un fonctionnement stable et une dynamique élevée quelles<br />
que soient les perturbations, il faut recourir à l’autopilotage. Le fonctionnement<br />
<strong>du</strong> moteur repose sur la création d’un champ tournant. Le synchronisme<br />
entre le champ <strong>du</strong> rotor et le champ tournant est piloté par la comman<strong>de</strong>.<br />
L’objectif est d’imposer un écart angulaire entre ces <strong>de</strong>ux champs<br />
ou en d’autres termes d’imposer la phase entre la force électromotrice et<br />
le courant dans une phase.<br />
Cette gran<strong>de</strong>ur est l’angle d’autopilotage. Cet angle d’autopilotage n’est<br />
autre que l’angle y (Figure 45).<br />
Le co<strong>de</strong>ur qui est solidaire <strong>du</strong> rotor permet <strong>de</strong> connaître précisément la<br />
position <strong>de</strong>s aimants <strong>du</strong> rotor et donc celle <strong>du</strong> champ généré par ces<br />
aimants.<br />
Pour mettre en oeuvre cet autopilotage, schématisé Figure 46, le contrôleur<br />
fait appel à la transformation <strong>de</strong> Park.<br />
Ref Iq<br />
Régulateur <strong>de</strong><br />
courant Iq<br />
Transformation inverse<br />
<strong>de</strong> Park et comman<strong>de</strong> <strong>du</strong><br />
commutateur<br />
Moteur<br />
Ref Id<br />
Régulateur <strong>de</strong><br />
courant Id<br />
Génération<br />
<strong>de</strong>s retours<br />
courants Id Iq<br />
Capteur<br />
<strong>de</strong><br />
position<br />
Figure 46 Principe <strong>de</strong> l’autopilotage<br />
28<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.













