

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6- Le dimensionnement<br />
6-1- La stratégie <strong>de</strong> comman<strong>de</strong><br />
La norme VDI 2143 fait généralement référence dans le domaine. Cette<br />
norme a été définie par l’association alleman<strong>de</strong> <strong>de</strong>s ingénieurs (VDI) pour<br />
décrire les profils <strong>de</strong> cames mécaniques. Ces profils sont parfaitement utilisables<br />
comme lois <strong>de</strong> comman<strong>de</strong> <strong>de</strong>s servomoteurs.<br />
La normalisation<br />
Les différents profils <strong>de</strong> mouvement sont définis <strong>de</strong> façon normalisée pour<br />
un déplacement <strong>de</strong> 1m effectué en 1s. Il en découle différents coefficients:<br />
C v : Coefficient <strong>de</strong> vitesse maximale<br />
C a : Coefficient d’accélération maximale<br />
C j : Coefficient <strong>de</strong> jerk maximal<br />
Cette normalisation permet <strong>de</strong> comparer très facilement les différentes<br />
lois <strong>de</strong> comman<strong>de</strong> et il est alors possible <strong>de</strong> dé<strong>du</strong>ire très facilement les valeurs<br />
maximales <strong>de</strong> vitesse, accélération et jerk pour <strong>de</strong>s déplacements <strong>de</strong><br />
longueurs et <strong>de</strong> <strong>du</strong>rées différentes. Notons également le coefficient C m qui<br />
donne une bonne indication <strong>de</strong> la puissance mécanique maximale nécessaire.<br />
Ce coefficient est la valeur maximale <strong>de</strong> la courbe (pro<strong>du</strong>it <strong>de</strong>s<br />
courbes <strong>de</strong> vitesse et d’accélération). Il est alors très simple d’obtenir les<br />
valeurs dynamiques maximales pour un déplacement quelconque (D) pendant<br />
un temps (T) grâce aux formules ci-<strong>de</strong>ssous :<br />
v max = C v (D/T)<br />
a max = C a (D/T 2 )<br />
J max =C j (D/T 3 )<br />
Ces données sont très importantes, car elles sont un <strong>de</strong>s facteurs déterminants<br />
dans le choix <strong>du</strong> moteur et <strong>du</strong> ré<strong>du</strong>cteur.<br />
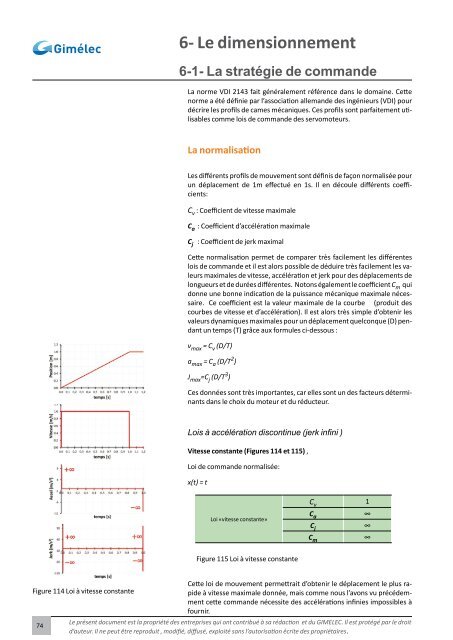
Lois à accélération discontinue (jerk infini )<br />
Vitesse constante (Figures 114 et 115) ,<br />
Loi <strong>de</strong> comman<strong>de</strong> normalisée:<br />
x(t) = t<br />
Loi «vitesse constante»<br />
C v 1<br />
C a<br />
∞<br />
C j<br />
∞<br />
C m<br />
∞<br />
Figure 115 Loi à vitesse constante<br />
Figure 114 Loi à vitesse constante<br />
74<br />
Cette loi <strong>de</strong> mouvement permettrait d’obtenir le déplacement le plus rapi<strong>de</strong><br />
à vitesse maximale donnée, mais comme nous l’avons vu précé<strong>de</strong>mment<br />
cette comman<strong>de</strong> nécessite <strong>de</strong>s accélérations infinies impossibles à<br />
fournir.<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.













