

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
6- Le dimensionnement<br />
6-1- La stratégie <strong>de</strong> comman<strong>de</strong><br />
Le contrôle <strong>du</strong> «jerk»<br />
Les lois <strong>de</strong> comman<strong>de</strong> proposées jusqu’à présent sont très simples à élaborer,<br />
mais elles présentent toutes un inconvénient majeur: les variations<br />
d’accélération, couramment appelées « Jerk », sont infinies.<br />
Ces variations peuvent être pénalisantes aussi bien pour la mécanique que<br />
pour le process même <strong>de</strong> la machine.<br />
La dérivée <strong>de</strong> l’accélération permet <strong>de</strong> déterminer ces variations. Cette dérivée<br />
s’exprime en [m/s 3 ].<br />
D’un point <strong>de</strong> vue électrique : le variateur n’est pas capable <strong>de</strong> faire varier<br />
instantanément le courant en raison <strong>de</strong> la constante <strong>de</strong> temps électrique<br />
<strong>du</strong> moteur et <strong>du</strong> temps <strong>de</strong> réponse <strong>du</strong> variateur. Il est donc nécessaire <strong>de</strong><br />
contrôler le jerk pour que le positionnement soit le plus fidèle possible à la<br />
consigne (écart <strong>de</strong> traînage ré<strong>du</strong>it). Cet écart doit être minimisé lors d’opérations<br />
<strong>de</strong> synchronisation ou d’interpolation.<br />
D’un point <strong>de</strong> vue mécanique : les variations d’accélérations engendrent<br />
une variation <strong>de</strong> couple moteur. Ce couple est transmis par le moteur à la<br />
charge et lorsque les variations <strong>de</strong> couple sont trop rapi<strong>de</strong>s, cela se tra<strong>du</strong>it<br />
par <strong>de</strong>s «à-coups» sur la charge.<br />
Ces «à-coups» peuvent rendre le système instable (oscillations plus ou<br />
moins longues à s’atténuer), ce qui va pénaliser le temps <strong>de</strong> cycle machine<br />
et échauffer les composants (le variateur essayant <strong>de</strong> corriger ces oscillations).<br />
Les «à-coups» peuvent également endommager ou user la mécanique prématurément<br />
et ré<strong>du</strong>ire la <strong>du</strong>rée <strong>de</strong> vie <strong>de</strong> certains éléments (paliers, ré<strong>du</strong>cteur,<br />
etc.).<br />
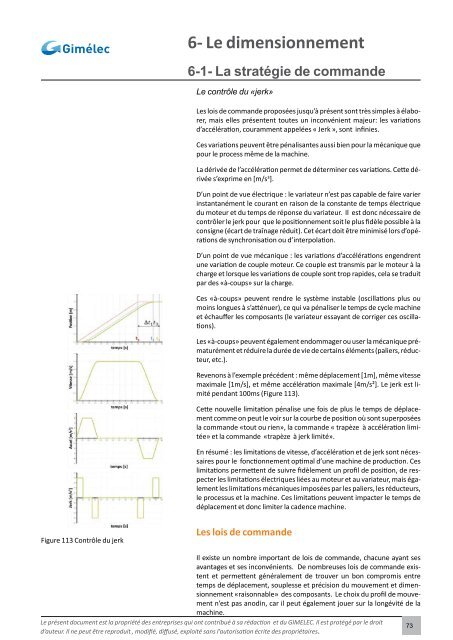
Revenons à l’exemple précé<strong>de</strong>nt : même déplacement [1m], même vitesse<br />
maximale [1m/s], et même accélération maximale [4m/s²]. Le jerk est limité<br />
pendant 100ms (Figure 113).<br />
Cette nouvelle limitation pénalise une fois <strong>de</strong> plus le temps <strong>de</strong> déplacement<br />
comme on peut le voir sur la courbe <strong>de</strong> position où sont superposées<br />
la comman<strong>de</strong> «tout ou rien», la comman<strong>de</strong> « trapèze à accélération limitée»<br />
et la comman<strong>de</strong> «trapèze à jerk limité».<br />
En résumé : les limitations <strong>de</strong> vitesse, d’accélération et <strong>de</strong> jerk sont nécessaires<br />
pour le fonctionnement optimal d’une machine <strong>de</strong> pro<strong>du</strong>ction. Ces<br />
limitations permettent <strong>de</strong> suivre fidèlement un profil <strong>de</strong> position, <strong>de</strong> respecter<br />
les limitations électriques liées au moteur et au variateur, mais également<br />
les limitations mécaniques imposées par les paliers, les ré<strong>du</strong>cteurs,<br />
le processus et la machine. Ces limitations peuvent impacter le temps <strong>de</strong><br />
déplacement et donc limiter la ca<strong>de</strong>nce machine.<br />
Figure 113 Contrôle <strong>du</strong> jerk<br />
Les lois <strong>de</strong> comman<strong>de</strong><br />
Il existe un nombre important <strong>de</strong> lois <strong>de</strong> comman<strong>de</strong>, chacune ayant ses<br />
avantages et ses inconvénients. De nombreuses lois <strong>de</strong> comman<strong>de</strong> existent<br />
et permettent généralement <strong>de</strong> trouver un bon compromis entre<br />
temps <strong>de</strong> déplacement, souplesse et précision <strong>du</strong> mouvement et dimensionnement<br />
«raisonnable» <strong>de</strong>s composants. Le choix <strong>du</strong> profil <strong>de</strong> mouvement<br />
n’est pas anodin, car il peut également jouer sur la longévité <strong>de</strong> la<br />
machine.<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
73<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.













