

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
5- Les mouvements et fonctions<br />
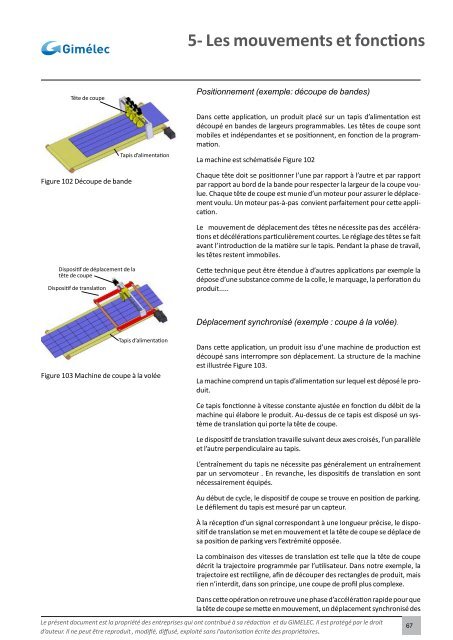
Tête <strong>de</strong> coupe<br />
Positionnement (exemple: découpe <strong>de</strong> ban<strong>de</strong>s)<br />
Figure 102 Découpe <strong>de</strong> ban<strong>de</strong><br />
Tapis d’alimentation<br />
Dans cette application, un pro<strong>du</strong>it placé sur un tapis d’alimentation est<br />
découpé en ban<strong>de</strong>s <strong>de</strong> largeurs programmables. Les têtes <strong>de</strong> coupe sont<br />
mobiles et indépendantes et se positionnent, en fonction <strong>de</strong> la programmation.<br />
La machine est schématisée Figure 102<br />
Chaque tête doit se positionner l’une par rapport à l’autre et par rapport<br />
par rapport au bord <strong>de</strong> la ban<strong>de</strong> pour respecter la largeur <strong>de</strong> la coupe voulue.<br />
Chaque tête <strong>de</strong> coupe est munie d’un moteur pour assurer le déplacement<br />
voulu. Un moteur pas-à-pas convient parfaitement pour cette application.<br />
Le mouvement <strong>de</strong> déplacement <strong>de</strong>s têtes ne nécessite pas <strong>de</strong>s accélérations<br />
et décélérations particulièrement courtes. Le réglage <strong>de</strong>s têtes se fait<br />
avant l’intro<strong>du</strong>ction <strong>de</strong> la matière sur le tapis. Pendant la phase <strong>de</strong> travail,<br />
les têtes restent immobiles.<br />
Dispositif <strong>de</strong> déplacement <strong>de</strong> la<br />
tête <strong>de</strong> coupe<br />
Dispositif <strong>de</strong> translation<br />
Cette technique peut être éten<strong>du</strong>e à d’autres applications par exemple la<br />
dépose d’une substance comme <strong>de</strong> la colle, le marquage, la perforation <strong>du</strong><br />
pro<strong>du</strong>it.....<br />
Déplacement synchronisé (exemple : coupe à la volée).<br />
Tapis d’alimentation<br />
Figure 103 Machine <strong>de</strong> coupe à la volée<br />
Dans cette application, un pro<strong>du</strong>it issu d’une machine <strong>de</strong> pro<strong>du</strong>ction est<br />
découpé sans interrompre son déplacement. La structure <strong>de</strong> la machine<br />
est illustrée Figure 103.<br />
La machine comprend un tapis d’alimentation sur lequel est déposé le pro<strong>du</strong>it.<br />
Ce tapis fonctionne à vitesse constante ajustée en fonction <strong>du</strong> débit <strong>de</strong> la<br />
machine qui élabore le pro<strong>du</strong>it. Au-<strong>de</strong>ssus <strong>de</strong> ce tapis est disposé un système<br />
<strong>de</strong> translation qui porte la tête <strong>de</strong> coupe.<br />
Le dispositif <strong>de</strong> translation travaille suivant <strong>de</strong>ux axes croisés, l’un parallèle<br />
et l’autre perpendiculaire au tapis.<br />
L’entraînement <strong>du</strong> tapis ne nécessite pas généralement un entraînement<br />
par un servomoteur . En revanche, les dispositifs <strong>de</strong> translation en sont<br />
nécessairement équipés.<br />
Au début <strong>de</strong> cycle, le dispositif <strong>de</strong> coupe se trouve en position <strong>de</strong> parking.<br />
Le défilement <strong>du</strong> tapis est mesuré par un capteur.<br />
À la réception d’un signal correspondant à une longueur précise, le dispositif<br />
<strong>de</strong> translation se met en mouvement et la tête <strong>de</strong> coupe se déplace <strong>de</strong><br />
sa position <strong>de</strong> parking vers l’extrémité opposée.<br />
La combinaison <strong>de</strong>s vitesses <strong>de</strong> translation est telle que la tête <strong>de</strong> coupe<br />
décrit la trajectoire programmée par l’utilisateur. Dans notre exemple, la<br />
trajectoire est rectiligne, afin <strong>de</strong> découper <strong>de</strong>s rectangles <strong>de</strong> pro<strong>du</strong>it, mais<br />
rien n’interdit, dans son principe, une coupe <strong>de</strong> profil plus complexe.<br />
Dans cette opération on retrouve une phase d’accélération rapi<strong>de</strong> pour que<br />
la tête <strong>de</strong> coupe se mette en mouvement, un déplacement synchronisé <strong>de</strong>s<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.<br />
67













