

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3- L’entraînement<br />
3-4- Les moteurs<br />
Il est donc nécessaire <strong>de</strong> développer un couple suffisant pour vaincre les<br />
couples résistants (machine et moteur) et mettre en mouvement l’ensemble<br />
<strong>de</strong>s inerties (moteur et charge).<br />
Quand le rotor atteint le pôle suivant (réel ou virtuel) qui correspond à une<br />
nouvelle position d’équilibre, il y a inévitablement un dépassement <strong>de</strong> la<br />
position et une oscillation parasite avant d’atteindre la position finale.<br />
Un changement <strong>de</strong> position typique est représenté Figure 37.<br />
Figure 37 Changement <strong>de</strong> position <strong>du</strong> rotor<br />
La limite <strong>de</strong> vitesse <strong>de</strong> rotation sera atteinte si la comman<strong>de</strong> <strong>de</strong> changement<br />
<strong>de</strong> pas arrive avant que le rotor ait eu le temps d’atteindre sa position<br />
d’équilibre. Cette limite sera fonction <strong>du</strong> couple résistant et <strong>de</strong> l’inertie <strong>de</strong><br />
l’ensemble <strong>de</strong> la chaîne cinématique.<br />
Couple à l’arrêt<br />
Le moteur pas-à-pas dans sa version à aimants ou composite présente un<br />
couple à l’arrêt en absence d’alimentation, nommé couple <strong>de</strong> détente, ce<br />
qui pour nombre d’applications est une caractéristique intéressante.<br />
Ce couple peut être augmenté <strong>de</strong> manière significative si les bobines sont<br />
alimentées; on parle alors <strong>de</strong> couple <strong>de</strong> maintien.<br />
On obtient le même effet avec un moteur à réluctance variable, mais cela<br />
con<strong>du</strong>it à maintenir l’alimentation <strong>de</strong>s bobines.<br />
L’inconvénient est la puissance dissipée dans le moteur qui ré<strong>du</strong>it le ren<strong>de</strong>ment<br />
<strong>de</strong> la motorisation.<br />
Cependant, les bobines étant localisées au stator, la dissipation est optimale<br />
et ce fonctionnement peut être prolongé.<br />
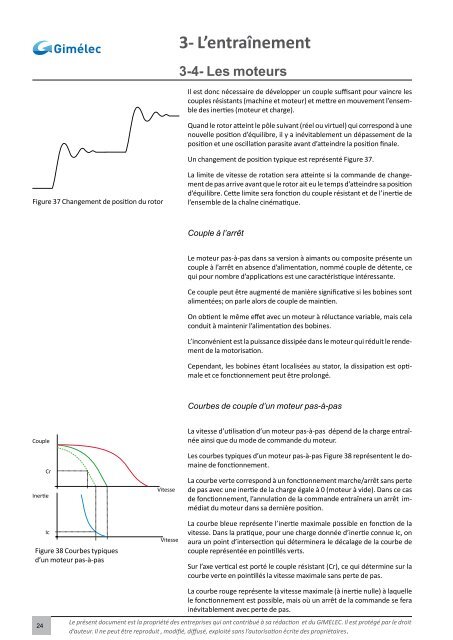
Courbes <strong>de</strong> couple d’un moteur pas-à-pas<br />
Couple<br />
Cr<br />
Inertie<br />
Ic<br />
Figure 38 Courbes typiques<br />
d’un moteur pas-à-pas<br />
Vitesse<br />
Vitesse<br />
La vitesse d’utilisation d’un moteur pas-à-pas dépend <strong>de</strong> la charge entraînée<br />
ainsi que <strong>du</strong> mo<strong>de</strong> <strong>de</strong> comman<strong>de</strong> <strong>du</strong> moteur.<br />
Les courbes typiques d’un moteur pas-à-pas Figure 38 représentent le domaine<br />
<strong>de</strong> fonctionnement.<br />
La courbe verte correspond à un fonctionnement marche/arrêt sans perte<br />
<strong>de</strong> pas avec une inertie <strong>de</strong> la charge égale à 0 (moteur à vi<strong>de</strong>). Dans ce cas<br />
<strong>de</strong> fonctionnement, l’annulation <strong>de</strong> la comman<strong>de</strong> entraînera un arrêt immédiat<br />
<strong>du</strong> moteur dans sa <strong>de</strong>rnière position.<br />
La courbe bleue représente l’inertie maximale possible en fonction <strong>de</strong> la<br />
vitesse. Dans la pratique, pour une charge donnée d’inertie connue Ic, on<br />
aura un point d’intersection qui déterminera le décalage <strong>de</strong> la courbe <strong>de</strong><br />
couple représentée en pointillés verts.<br />
Sur l’axe vertical est porté le couple résistant (Cr), ce qui détermine sur la<br />
courbe verte en pointillés la vitesse maximale sans perte <strong>de</strong> pas.<br />
24<br />
La courbe rouge représente la vitesse maximale (à inertie nulle) à laquelle<br />
le fonctionnement est possible, mais où un arrêt <strong>de</strong> la comman<strong>de</strong> se fera<br />
inévitablement avec perte <strong>de</strong> pas.<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.













