

Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...
Guide Motion Control du GIMELEC - Ministère de l'Ãducation ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
8- Le réglage <strong>de</strong> l’asservissement<br />
Un système est dit stable quand, écarté <strong>de</strong> sa position d’équilibre, il y revient<br />
spontanément et s’y maintient. Il peut y revenir avec dépassement<br />
avec ou sans oscillations. Dans un contrôle <strong>de</strong> mouvement, il est impératif<br />
que l’atteinte <strong>de</strong> la position finale se fasse sans dépassement ni oscillations.<br />
Hormis les variateurs pour moteurs pas-à-pas, les contrôleurs utilisent <strong>de</strong>s<br />
boucles <strong>de</strong> retour. Dans certaines conditions, ces boucles peuvent <strong>de</strong>venir<br />
instables et un réglage minutieux doit être effectué pour éliminer cette<br />
éventualité.<br />
Pour simplifier la mise en service, les contrôleurs sont dotés <strong>de</strong> fonctions<br />
d’auto ajustement ou d’ateliers logiciels d’ai<strong>de</strong> au réglage. Les ajustements<br />
s’effectuent toujours <strong>de</strong> la <strong>de</strong>rnière boucle, c’est-à-dire la boucle <strong>de</strong> courant,<br />
vers la première : la boucle <strong>de</strong> position. L’ajustement <strong>de</strong> la boucle <strong>de</strong><br />
courant est le plus critique. Il nécessite <strong>de</strong> connaître avec précision les caractéristiques<br />
électriques <strong>du</strong> moteur en particulier l’in<strong>du</strong>ctance et la résistance<br />
<strong>de</strong>s bobinages.<br />
L’ajustement <strong>de</strong> la boucle <strong>de</strong> courant peut se faire, tout simplement, en<br />
appairant le moteur et le variateur. Les caractéristiques <strong>du</strong> moteur étant<br />
connues, les réglages <strong>de</strong> gain sont paramétrés à la fabrication <strong>du</strong> variateur.<br />
Cette association moteur/variateur est figée.<br />
Une autre possibilité, qui apporte plus <strong>de</strong> souplesse, consiste à inscrire<br />
dans la mémoire interne <strong>du</strong> co<strong>de</strong>ur associé au moteur les paramètres <strong>de</strong><br />
celui-ci. À la première mise en marche <strong>du</strong> dispositif avec le moteur branché,<br />
le dispositif lit automatiquement le bloc <strong>de</strong> données <strong>du</strong> co<strong>de</strong>ur qui contient<br />
<strong>de</strong>s informations techniques sur le moteur comme les couples <strong>de</strong> pointe et<br />
nominal, le courant et la vitesse <strong>de</strong> rotation nominaux, le nombre <strong>de</strong> paires<br />
<strong>de</strong> pôles, la résistance et l’in<strong>du</strong>ctance <strong>de</strong>s bobinages. Avec ces informations,<br />
les gains <strong>de</strong> la boucle ou <strong>de</strong>s boucles <strong>de</strong> courant sont automatiquement<br />
réglés.<br />
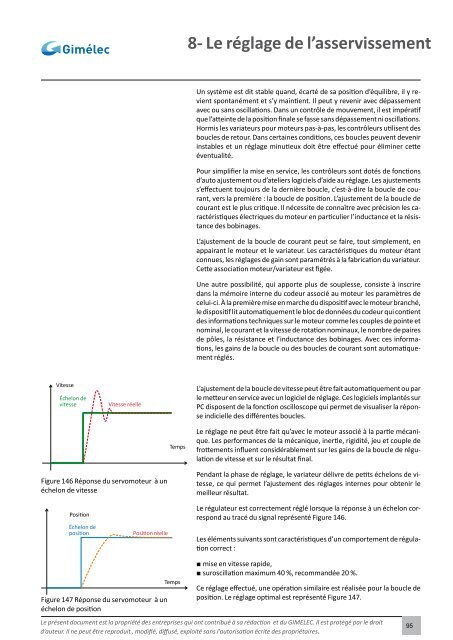
Vitesse<br />
Échelon <strong>de</strong><br />
vitesse<br />
Vitesse réelle<br />
L’ajustement <strong>de</strong> la boucle <strong>de</strong> vitesse peut être fait automatiquement ou par<br />
le metteur en service avec un logiciel <strong>de</strong> réglage. Ces logiciels implantés sur<br />
PC disposent <strong>de</strong> la fonction oscilloscope qui permet <strong>de</strong> visualiser la réponse<br />
indicielle <strong>de</strong>s différentes boucles.<br />
Temps<br />
Le réglage ne peut être fait qu’avec le moteur associé à la partie mécanique.<br />
Les performances <strong>de</strong> la mécanique, inertie, rigidité, jeu et couple <strong>de</strong><br />
frottements influent considérablement sur les gains <strong>de</strong> la boucle <strong>de</strong> régulation<br />
<strong>de</strong> vitesse et sur le résultat final.<br />
Figure 146 Réponse <strong>du</strong> servomoteur à un<br />
échelon <strong>de</strong> vitesse<br />
Pendant la phase <strong>de</strong> réglage, le variateur délivre <strong>de</strong> petits échelons <strong>de</strong> vitesse,<br />
ce qui permet l’ajustement <strong>de</strong>s réglages internes pour obtenir le<br />
meilleur résultat.<br />
Position<br />
Échelon <strong>de</strong><br />
position<br />
Position réelle<br />
Le régulateur est correctement réglé lorsque la réponse à un échelon correspond<br />
au tracé <strong>du</strong> signal représenté Figure 146.<br />
Les éléments suivants sont caractéristiques d’un comportement <strong>de</strong> régulation<br />
correct :<br />
Figure 147 Réponse <strong>du</strong> servomoteur à un<br />
échelon <strong>de</strong> position<br />
Temps<br />
■■mise en vitesse rapi<strong>de</strong>,<br />
■■suroscillation maximum 40 %, recommandée 20 %.<br />
Ce réglage effectué, une opération similaire est réalisée pour la boucle <strong>de</strong><br />
position. Le réglage optimal est représenté Figure 147.<br />
Le présent document est la propriété <strong>de</strong>s entreprises qui ont contribué à sa rédaction et <strong>du</strong> <strong>GIMELEC</strong>. Il est protégé par le droit<br />
d’auteur. Il ne peut être repro<strong>du</strong>it , modifié, diffusé, exploité sans l’autorisation écrite <strong>de</strong>s propriétaires.<br />
95













