Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck
Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck
Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
ARTEMIS — DIE WEITERFÜHRUNG VON MONSUN FÜR DIE MEDIZINISCHE ANWENDUNG 63<br />
Die Fortenwicklung geschieht einerseits im Sektor der Roboter und Effektoren, wo die<br />
bislang bei MONSUN eher handhabungs- und fertigungstechnisch ausgelegten Roboter<br />
durch Systeme <strong>für</strong> den medizinischen Einsatz ersetzt bzw. ergänzt werden, andererseits<br />
werden auch im Systemkonzept Veränderungen vorgeschlagen.<br />
Dies hat seine Notwendigkeit unter anderem auch darin, daß bei der Festlegung der<br />
MONSUN-Prinzipien die Assoziation zwischen MEH und AEH dominierend war. Für den<br />
Einsatz mit allen schon in MONSUN eingeführten Objekten hat sich dieses Konzept zum Teil<br />
als zu starr erwiesen und muß entsprechend angepaßt werden.<br />
4.3.2 ROBOX — Beispiel einer <strong>für</strong> den Medizineinsatz entwickelten<br />
Telemanipulator-Komponente<br />
Als Beispiel <strong>für</strong> einen an den medizinischen Einsatz angepaßten Effektor sei hier „EFS-<br />
ROBOX“ stellvertretend genannt.<br />
Hierbei handelt es sich um ein Endoskopführungssystem (EFS), das es ermöglicht, über<br />
MONSUN-Protokolle ein in einem Träger montiertes 3D-Video-Endoskop zu positionieren.<br />
Im Sprachgebrauch der MONSUN-Objekte ist ROBOX damit eine TEH.<br />
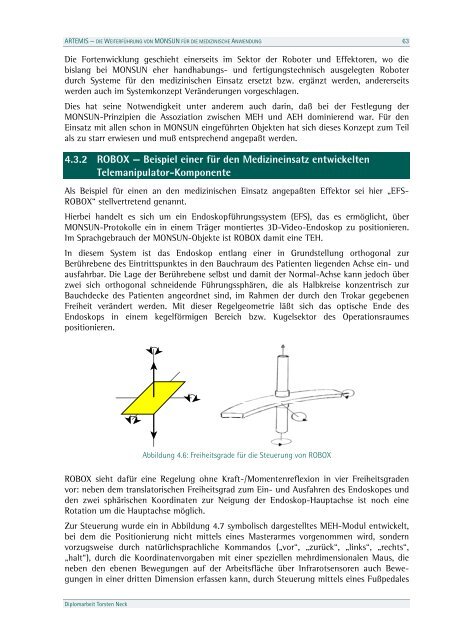
In diesem System ist das Endoskop entlang einer in Grundstellung orthogonal zur<br />
Berührebene des Eintrittspunktes in den Bauchraum des Patienten liegenden Achse ein- und<br />
ausfahrbar. Die Lage der Berührebene selbst und damit der Normal-Achse kann jedoch über<br />
zwei sich orthogonal schneidende Führungssphären, die als Halbkreise konzentrisch zur<br />
Bauchdecke des Patienten angeordnet sind, im Rahmen der durch den Trokar gegebenen<br />
Freiheit verändert werden. Mit dieser Regelgeometrie läßt sich das optische Ende des<br />
Endoskops in einem kegelförmigen Bereich bzw. Kugelsektor des Operationsraumes<br />
positionieren.<br />
Abbildung 4.6: Freiheitsgrade <strong>für</strong> die Steuerung <strong>von</strong> ROBOX<br />
ROBOX sieht da<strong>für</strong> eine Regelung ohne Kraft-/Momentenreflexion in vier Freiheitsgraden<br />
vor: neben dem translatorischen Freiheitsgrad zum Ein- und Ausfahren des Endoskopes und<br />
den zwei sphärischen Koordinaten zur Neigung der Endoskop-Hauptachse ist noch eine<br />
Rotation um die Hauptachse möglich.<br />
Zur Steuerung wurde ein in 3Abbildung 4.7 symbolisch dargestelltes MEH-Modul entwickelt,<br />
bei dem die Positionierung nicht mittels eines Masterarmes vorgenommen wird, sondern<br />
vorzugsweise durch natürlichsprachliche Kommandos („vor“, „zurück“, „links“, „rechts“,<br />
„halt“), durch die Koordinatenvorgaben mit einer speziellen mehrdimensionalen Maus, die<br />
neben den ebenen Bewegungen auf der Arbeitsfläche über Infrarotsensoren auch Bewegungen<br />
in einer dritten Dimension erfassen kann, durch Steuerung mittels eines Fußpedales<br />
Diplomarbeit <strong>Torsten</strong> <strong>Neck</strong>