OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
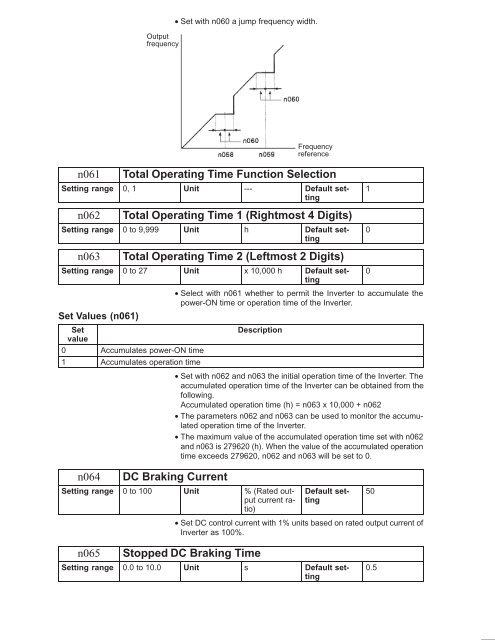
Output<br />
frequency<br />
• Set with n060 a jump frequency width.<br />
Frequency<br />
reference<br />
n061<br />
Total Operating Time Function Selection<br />
Setting range 0, 1 Unit --- Default setting<br />
n062<br />
Total Operating Time 1 (Rightmost 4 Digits)<br />
Setting range 0 to 9,999 Unit h Default setting<br />
n063<br />
Total Operating Time 2 (Leftmost 2 Digits)<br />
Setting range 0 to 27 Unit x 10,000 h Default setting<br />
1<br />
0<br />
0<br />
• Select with n061 whether to permit the Inverter to accumulate the<br />
power-ON time or operation time of the Inverter.<br />
Set Values (n061)<br />
Set<br />
Description<br />
value<br />
0 Accumulates power-ON time<br />
1 Accumulates operation time<br />
• Set with n062 and n063 the initial operation time of the Inverter. The<br />
accumulated operation time of the Inverter can be obtained from the<br />
following.<br />
Accumulated operation time (h) = n063 x 10,000 + n062<br />
• The parameters n062 and n063 can be used to monitor the accumulated<br />
operation time of the Inverter.<br />
• The maximum value of the accumulated operation time set with n062<br />
and n063 is 279620 (h). When the value of the accumulated operation<br />
time exceeds 279620, n062 and n063 will be set to 0.<br />
n064<br />
DC Braking Current<br />
Setting range 0 to 100 Unit % (Rated output<br />
current ratio)<br />
Default setting<br />
50<br />
• Set DC control current with 1% units based on rated output current of<br />
Inverter as 100%.<br />
n065<br />
Stopped DC Braking Time<br />
Setting range 0.0 to 10.0 Unit s Default setting<br />
0.5