OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Function<br />
No.<br />
Name<br />
Description<br />
Setting<br />
range<br />
User<br />
setting<br />
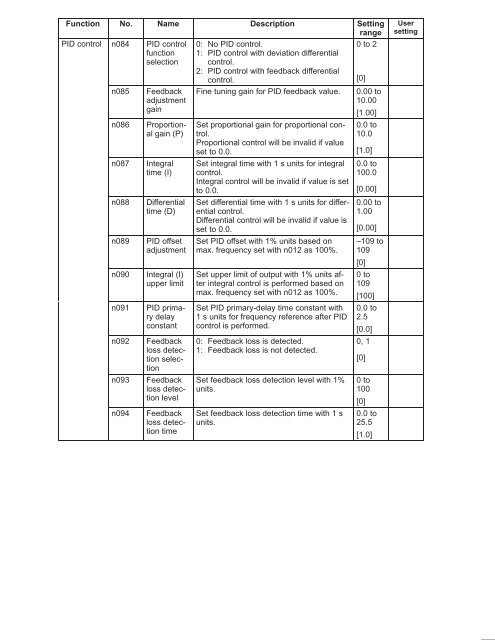
PID control n084 PID control<br />
function<br />
selection<br />
0: No PID control.<br />
1: PID control with deviation differential<br />
control.<br />
2: PID control with feedback differential<br />
control.<br />
0 to 2<br />
[0]<br />
n085<br />
Feedback<br />
adjustment<br />
gain<br />
Fine tuning gain for PID feedback value.<br />
0.00 to<br />
10.00<br />
[1.00]<br />
n086<br />
Proportional<br />
gain (P)<br />
Set proportional gain for proportional control.<br />
Proportional control will be invalid if value<br />
set to 0.0.<br />
0.0 to<br />
10.0<br />
[1.0]<br />
n087<br />
Integral<br />
time (I)<br />
Set integral time with 1 s units for integral<br />
control.<br />
Integral control will be invalid if value is set<br />
to 0.0.<br />
0.0 to<br />
100.0<br />
[0.00]<br />
n088<br />
Differential<br />
time (D)<br />
Set differential time with 1 s units for differential<br />
control.<br />
Differential control will be invalid if value is<br />
set to 0.0.<br />
0.00 to<br />
1.00<br />
[0.00]<br />
n089<br />
PID offset<br />
adjustment<br />
Set PID offset with 1% units based on<br />
max. frequency set with n012 as 100%.<br />
–109 to<br />
109<br />
[0]<br />
n090<br />
Integral (I)<br />
upper limit<br />
Set upper limit of output with 1% units after<br />
integral control is performed based on<br />
max. frequency set with n012 as 100%.<br />
0 to<br />
109<br />
[100]<br />
n091<br />
PID primary<br />
delay<br />
constant<br />
Set PID primary-delay time constant with<br />
1 s units for frequency reference after PID<br />
control is performed.<br />
0.0 to<br />
2.5<br />
[0.0]<br />
n092<br />
Feedback<br />
loss detection<br />
selection<br />
0: Feedback loss is detected.<br />
1: Feedback loss is not detected.<br />
0, 1<br />
[0]<br />
n093<br />
Feedback<br />
loss detection<br />
level<br />
Set feedback loss detection level with 1%<br />
units.<br />
0 to<br />
100<br />
[0]<br />
n094<br />
Feedback<br />
loss detection<br />
time<br />
Set feedback loss detection time with 1 s<br />
units.<br />
0.0 to<br />
25.5<br />
[1.0]