OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
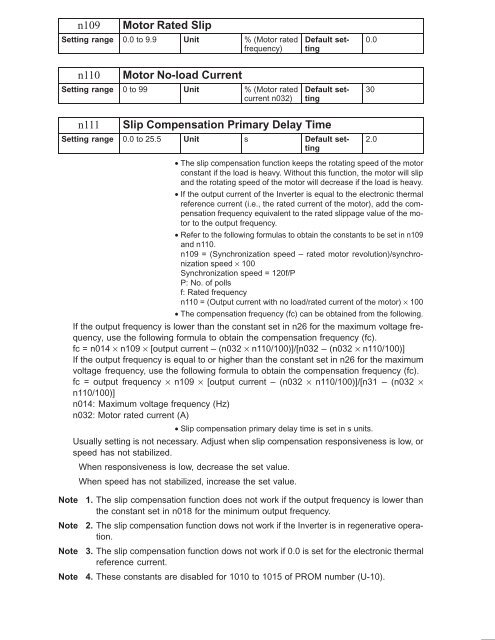
n109<br />
Motor Rated Slip<br />
Setting range 0.0 to 9.9 Unit % (Motor rated<br />
frequency)<br />
Default setting<br />
0.0<br />
n110<br />
Motor No-load Current<br />
Setting range 0 to 99 Unit % (Motor rated<br />
current n032)<br />
Default setting<br />
30<br />
n111<br />
Slip Compensation Primary Delay Time<br />
Setting range 0.0 to 25.5 Unit s Default setting<br />
2.0<br />
• The slip compensation function keeps the rotating speed of the motor<br />
constant if the load is heavy. Without this function, the motor will slip<br />
and the rotating speed of the motor will decrease if the load is heavy.<br />
• If the output current of the Inverter is equal to the electronic thermal<br />
reference current (i.e., the rated current of the motor), add the compensation<br />
frequency equivalent to the rated slippage value of the motor<br />
to the output frequency.<br />
• Refer to the following formulas to obtain the constants to be set in n109<br />
and n110.<br />
n109 = (Synchronization speed – rated motor revolution)/synchronization<br />
speed × 100<br />
Synchronization speed = 120f/P<br />
P: No. of polls<br />
f: Rated frequency<br />
n110 = (Output current with no load/rated current of the motor) × 100<br />
• The compensation frequency (fc) can be obtained from the following.<br />
If the output frequency is lower than the constant set in n26 for the maximum voltage frequency,<br />
use the following formula to obtain the compensation frequency (fc).<br />
fc = n014 × n109 × [output current – (n032 × n110/100)]/[n032 – (n032 × n110/100)]<br />
If the output frequency is equal to or higher than the constant set in n26 for the maximum<br />
voltage frequency, use the following formula to obtain the compensation frequency (fc).<br />
fc = output frequency × n109 × [output current – (n032 × n110/100)]/[n31 – (n032 ×<br />
n110/100)]<br />
n014: Maximum voltage frequency (Hz)<br />
n032: Motor rated current (A)<br />
• Slip compensation primary delay time is set in s units.<br />
Usually setting is not necessary. Adjust when slip compensation responsiveness is low, or<br />
speed has not stabilized.<br />
When responsiveness is low, decrease the set value.<br />
When speed has not stabilized, increase the set value.<br />
Note<br />
Note<br />
Note<br />
Note<br />
1. The slip compensation function does not work if the output frequency is lower than<br />
the constant set in n018 for the minimum output frequency.<br />
2. The slip compensation function dows not work if the Inverter is in regenerative operation.<br />
3. The slip compensation function dows not work if 0.0 is set for the electronic thermal<br />
reference current.<br />
4. These constants are disabled for 1010 to 1015 of PROM number (U-10).