OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section
OMRON Sysdrive 3G3HV - Detector Cooling Section

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
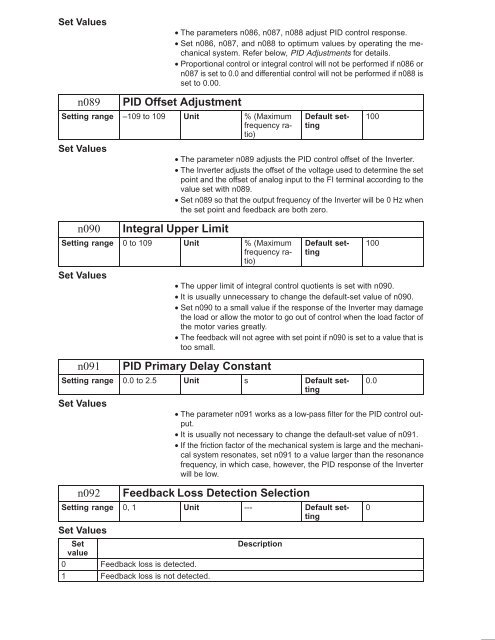
Set Values<br />
• The parameters n086, n087, n088 adjust PID control response.<br />
• Set n086, n087, and n088 to optimum values by operating the mechanical<br />
system. Refer below, PID Adjustments for details.<br />
• Proportional control or integral control will not be performed if n086 or<br />
n087 is set to 0.0 and differential control will not be performed if n088 is<br />
set to 0.00.<br />
n089<br />
PID Offset Adjustment<br />
Setting range –109 to 109 Unit % (Maximum<br />
frequency ratio)<br />
Set Values<br />
n090<br />
Default setting<br />
100<br />
• The parameter n089 adjusts the PID control offset of the Inverter.<br />
• The Inverter adjusts the offset of the voltage used to determine the set<br />
point and the offset of analog input to the FI terminal according to the<br />
value set with n089.<br />
• Set n089 so that the output frequency of the Inverter will be 0 Hz when<br />
the set point and feedback are both zero.<br />
Integral Upper Limit<br />
Setting range 0 to 109 Unit % (Maximum<br />
frequency ratio)<br />
Set Values<br />
n091<br />
Default setting<br />
100<br />
• The upper limit of integral control quotients is set with n090.<br />
• It is usually unnecessary to change the default-set value of n090.<br />
• Set n090 to a small value if the response of the Inverter may damage<br />
the load or allow the motor to go out of control when the load factor of<br />
the motor varies greatly.<br />
• The feedback will not agree with set point if n090 is set to a value that is<br />
too small.<br />
PID Primary Delay Constant<br />
Setting range 0.0 to 2.5 Unit s Default setting<br />
Set Values<br />
• The parameter n091 works as a low-pass filter for the PID control output.<br />
• It is usually not necessary to change the default-set value of n091.<br />
• If the friction factor of the mechanical system is large and the mechanical<br />
system resonates, set n091 to a value larger than the resonance<br />
frequency, in which case, however, the PID response of the Inverter<br />
will be low.<br />
0.0<br />
n092<br />
Feedback Loss Detection Selection<br />
Setting range 0, 1 Unit --- Default setting<br />
Set Values<br />
Set<br />
Description<br />
value<br />
0 Feedback loss is detected.<br />
1 Feedback loss is not detected.<br />
0