- Seite 1 und 2:
40 Jahre Informatik in München: 19
- Seite 3 und 4:
Inhaltsverzeichnis: 40 Jahre Inform
- Seite 5 und 6:
VomHochleistungs- zum Höchstleistu
- Seite 7 und 8:
E-Mail ............................
- Seite 9 und 10:
X: Deutsches Museum ...............
- Seite 11 und 12:
Vorwort DieFrage lautet: Seit wann
- Seite 13 und 14:
Geleitwort 40 Jahre Studiengang Inf
- Seite 15 und 16:
Festschrift ,,40 Jahre Informatik
- Seite 17 und 18:
mungen um Flugkörper beteiligt war
- Seite 19 und 20:
che hochempfindlichen Magnetköpfe
- Seite 21 und 22:
durch die Elektroingenieure Wilhelm
- Seite 23 und 24:
tiggestellt. Von der Bedienung her
- Seite 25 und 26:
Rahmen der ZMMD-Gruppe (,,Zürich-M
- Seite 27 und 28:
demie der Wissenschaften. 1966 wurd
- Seite 29 und 30:
Der Compiler war modular aufgebaut.
- Seite 31 und 32:
darauf, Ende 1963, auch Klaus Samel
- Seite 33 und 34:
kehrter Kollege K. Samelson. Bald s
- Seite 35 und 36:
Helgrit Wich (Walther), Hedwig Vogg
- Seite 37 und 38:
Angela Molitoris Aus einem Brief vo
- Seite 39 und 40:
‘Hummel in Schlafstellung’. In
- Seite 41 und 42:
an der TU München schon 650 Inform
- Seite 43 und 44:
Bundestag später (am 12. Mai 1969)
- Seite 45 und 46:
,,Elektronik-Praktikum“. In Münc
- Seite 47 und 48:
konnte der grundsätzlich mögliche
- Seite 49 und 50:
durch Aufprägung der statischen Bl
- Seite 51 und 52:
November 1967 Sonderforschungsberei
- Seite 53 und 54:
Die Teilprojekte des SFB 49 waren (
- Seite 55 und 56:
son (†), Schecher (†), Schmidt,
- Seite 57 und 58:
kann. Ferner wurde in der Arbeit di
- Seite 59 und 60:
— Stufenweiser (‘modularer’)
- Seite 61 und 62:
Es gibt in allerneusten Zeiten gesc
- Seite 63 und 64:
Die Münchner Informatik-Sonne (Fas
- Seite 65 und 66:
ermann. Am gleichen Tag las der Hoc
- Seite 67 und 68:
Wie alle Entscheidungen, die schnel
- Seite 69 und 70:
1. Mechanisierung des Ziffernrechne
- Seite 71 und 72:
ger Westermann 11. 10. 2002, Helmut
- Seite 73 und 74:
Robert Sauer stellte die Weichen f
- Seite 75 und 76:
In der Mathematik bestehen derzeit
- Seite 77 und 78:
Die Arbeiten von Edsger Dijkstra, O
- Seite 79 und 80:
dieses neue Forschungsgebiet mit er
- Seite 81 und 82:
lige Schule. Ernst-Erich Doberkat
- Seite 83 und 84:
hatte, ob meiner Ahnungslosigkeit,
- Seite 85 und 86:
Ein herausragender Student am Insti
- Seite 87 und 88:
Persönlichkeiten, die eine Rolle i
- Seite 89 und 90:
lückenlosen Programmkorrektheitsbe
- Seite 91 und 92:
zuverlässige Kommunikation über d
- Seite 93 und 94:
eine Ausgründung zur Vermarktung e
- Seite 95 und 96:
v. r.: Heinz Gerhäuser, Manfred Br
- Seite 97 und 98:
Ingenieurwesen) uns auch für die w
- Seite 99 und 100:
Geldgeber nicht immer so buchstaben
- Seite 101 und 102:
Deutsches Forschungsnetz (DFN). Sch
- Seite 103 und 104:
Die Informatik der Technischen Univ
- Seite 105 und 106:
FORSCHUNG UND LEHRE Frauen in der I
- Seite 107 und 108:
junge Menschen für das Informatiks
- Seite 109 und 110:
Ernst A. Graf mit der von ihm konst
- Seite 111 und 112:
Festschrift ,,40 Jahre Informatik
- Seite 113 und 114:
mehr als eine Anlage nach München
- Seite 115 und 116:
der Statistiker Hans Richter, der M
- Seite 117 und 118:
Die TR 4 lief von Anfang an zuverl
- Seite 119 und 120:
schnelleren Anlage unabweisbar notw
- Seite 121 und 122:
ferstufen ab. 1977 wurde das LRZ re
- Seite 123 und 124:
des AEG-Netzes an neuere Systemvers
- Seite 125 und 126:
Juni/Juli 1987: Die beiden CYBER-Sy
- Seite 127 und 128:
schen Hochschulen führten. Dazu wu
- Seite 129 und 130:
März/April 1992: Nach Fertigstellu
- Seite 131 und 132:
Das Software-Angebot des LRZ. Neben
- Seite 133 und 134:
Juli 1993: Installation einer 34 Mb
- Seite 135 und 136:
Bedarfsumfrage des Kultusministeriu
- Seite 137 und 138:
Probleme aus dem LRZ-Betrieb gaben
- Seite 139 und 140:
Da viele Daten bei einem Systemausf
- Seite 141 und 142:
DSL-Anschlüssen. 2005 wird der Ans
- Seite 143 und 144:
DER NEUE STANDORT GARCHING 26. Mär
- Seite 145 und 146:
Computational Science and Engineeri
- Seite 147 und 148:
Gesamtansicht (von Süden): LRZ-Kub
- Seite 149 und 150:
Festschrift ‘40 Jahre Informatik
- Seite 151 und 152:
TR 440 Monoprozessor im LRZ (Novemb
- Seite 153 und 154:
es war auch viel leistungsfähiger.
- Seite 155 und 156:
nach dem Einschalten automatisch au
- Seite 157 und 158:
Arbeitsplatz von Franz Oettl (∗ 1
- Seite 159 und 160:
Konfiguration TR 440 Doppelprozesso
- Seite 161 und 162:
VOMGROSSRECHNER ZUM VERNETZTEN PC V
- Seite 163 und 164:
Die Zentraleinheit war von Siemens-
- Seite 165 und 166:
Teilsystem C. Es basierte auf den e
- Seite 167 und 168:
derkonditionen, da unsere Beschaffu
- Seite 169 und 170:
anboten, ausgewertet. Die TUM hatte
- Seite 171 und 172:
Modellversuch ‘Studenteneigene Re
- Seite 173 und 174:
Beantragte Konfiguration des Workst
- Seite 175 und 176:
Offene Hardware Architektur mit sta
- Seite 177 und 178:
Informatikhalle Robert-Sauer-Bau (I
- Seite 179 und 180:
experimentellen Charakter; sie wurd
- Seite 181 und 182:
WORLD WIDE WEB, MULTIMEDIA Der Zeit
- Seite 183 und 184:
und weltweit zugänglichen Informat
- Seite 185 und 186:
ten Einrichtungen wie IT-Verwaltung
- Seite 187 und 188:
Teil langwierige Suche nach Fachbeg
- Seite 189 und 190:
narien lag in den Händen von Ruper
- Seite 191 und 192:
Video-Konfiguration zuletzt am Info
- Seite 193 und 194:
INFRASTRUKTUR IN GARCHING Netz-Infr
- Seite 195 und 196:
Netzübersicht Garching Hochleistun
- Seite 197 und 198:
PCs ausgetauscht werden müssen, bi
- Seite 199 und 200:
Dabei sind bei den auslaufenden E-M
- Seite 201 und 202:
Festschrift ,,40 Jahre Informatik
- Seite 203 und 204:
phase, die etwa durch das kurzfrist
- Seite 205 und 206:
des schwach quadratischen Gleichung
- Seite 207 und 208:
Die Münchner Gruppe unter der Leit
- Seite 209 und 210:
z. B. die Rolle des Computers in de
- Seite 211 und 212:
land und den USA. Auch Ivo Schneide
- Seite 213 und 214:
(9) 1988 Constructive Methods in Co
- Seite 215 und 216:
Die Marktoberdorfer Sommerschule de
- Seite 217 und 218:
Traditionen in Marktoberdorf. Diese
- Seite 219 und 220:
21. bis 30. April 1981. Die Vortrag
- Seite 221 und 222:
Abgeschiedenheit etwa eines Bergtal
- Seite 223 und 224:
der durch die Ferienakademie geför
- Seite 225 und 226:
Dipl.-Ing. Wilfried Lochte, MAN Gmb
- Seite 227 und 228:
LMU, sowie 4 Studenten aus Erlangen
- Seite 229 und 230:
Universität Stuttgart in den Kreis
- Seite 231 und 232:
akademie teil. Es soll auch nicht u
- Seite 233 und 234:
niert, hat sich dabei vor allem die
- Seite 235 und 236:
Festschrift ,,40 Jahre Informatik
- Seite 237 und 238:
ZEHN JAHRE STUDIENGANG INFORMATIK:
- Seite 239 und 240:
von Vorführungen vorbereitet, die
- Seite 241 und 242:
Die Veranstaltung, die der Profilie
- Seite 243 und 244:
Faksimile: Einladung zum Kolloquium
- Seite 245 und 246:
Otto Meitinger, Zohar Manna, F. L.
- Seite 247 und 248:
er sei der von ihm am meisten gesch
- Seite 249 und 250: Für dieses ungewöhnliche Bauvorha
- Seite 251 und 252: Ministerpräsident Dr. Edmund Stoib
- Seite 253 und 254: von-Dyck-Preis für hervorragende N
- Seite 255 und 256: Schließlich macht Sie Hermann Jord
- Seite 257 und 258: Jedoch nur wenn eine Programmierspr
- Seite 259 und 260: Sie selbst verfolgen konsequent die
- Seite 261 und 262: Laudatio auf den Mathematiker Fried
- Seite 263 und 264: Und neue Begriffe entstehen: Festko
- Seite 265 und 266: Der jüdischen Mathematiker Deutsch
- Seite 267 und 268: Festschrift ,,40 Jahre Informatik
- Seite 269 und 270: Gründung der Informatik in Passau.
- Seite 271 und 272: In dieser ersten Zeit umfasste das
- Seite 273 und 274: X: DEUTSCHES MUSEUM Festschrift ,,4
- Seite 275 und 276: ten Ausstellung ‘Nachrichtentechn
- Seite 277 und 278: derrechnung zu finden sind. Zu sehe
- Seite 279 und 280: ten sich oft lange darin auf, wenn
- Seite 281 und 282: Kongreß und Messe SYSTEMS 1979 wur
- Seite 283 und 284: und sieben Projektvorstellungen) pr
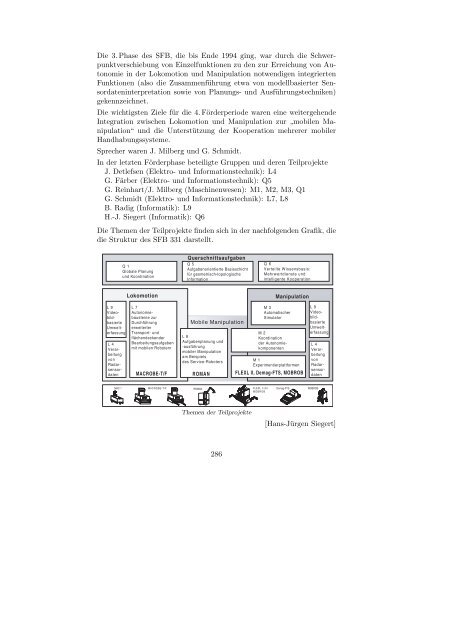
- Seite 285 und 286: ad Zuse überreichte die Medaille.
- Seite 287 und 288: XII : DARA — IFIP — GI Festschr
- Seite 289 und 290: NTG stand, betonte weitsichtig den
- Seite 291 und 292: Einführung von Informatik-Studieng
- Seite 293 und 294: zum German Chapter der ACM konnte p
- Seite 295 und 296: XIII : DFG Festschrift ‘40 Jahre
- Seite 297 und 298: entwickelt, die die hochgezüchtete
- Seite 299: trums als Standort der Bundeshöchs
- Seite 303 und 304: Projekt — in Zusammenarbeit mit d
- Seite 305 und 306: Festschrift ,,40 Jahre Informatik
- Seite 307 und 308: Informatik X — Rechnertechnik und
- Seite 309 und 310: AKTUELLER LEHRK ÖRPER Nachfolgend
- Seite 311 und 312: Forschungsgebiete des Lehrstuhls Di
- Seite 313 und 314: Forschungsgebiete des Lehrstuhls Di
- Seite 315 und 316: Forschungsgebiete des Lehrstuhls Se
- Seite 317 und 318: Forschungsgebiete der Professur Heu
- Seite 319 und 320: Forschungsgebiete des Lehrstuhls Fo
- Seite 321 und 322: Forschungsgebiete der Professur Die
- Seite 323 und 324: Forschungsgebiete des Lehrstuhls Di
- Seite 325 und 326: Forschungsgebiete der Professur Die
- Seite 327 und 328: 3. Kognitive Robotik. Hier geht es
- Seite 329 und 330: Forschungsgebiete Die in der Arbeit
- Seite 331 und 332: Forschungsgebiete der Professur Die
- Seite 333 und 334: Lehrstuhl verwendeten Modellierungs
- Seite 335 und 336: Forschungsgebiete der Professur Des
- Seite 337 und 338: Forschungsgebiete des Lehrstuhls Th
- Seite 339 und 340: Forschungsgebiete der Professur Mei
- Seite 341 und 342: Forschungsgebiete der Professur Mod
- Seite 343 und 344: Forschungsgebiete des Lehrstuhls De
- Seite 345 und 346: Forschungsgebiete der Professur Im
- Seite 347 und 348: Wissens management Groupware Forsch
- Seite 349 und 350: unterstützung zusammenzutragen und
- Seite 351 und 352:
Forschungsgebiete des Lehrstuhls Di
- Seite 353 und 354:
Forschungsgebiete des Lehrstuhls Au
- Seite 355 und 356:
Forschungsgebiete der Professur Die
- Seite 357 und 358:
Forschungsgebiete des Lehrstuhls Di
- Seite 359 und 360:
Forschungsgebiete der Professur Die
- Seite 361 und 362:
Forschungsgebiete des Lehrstuhls In
- Seite 363 und 364:
Forschungsgebiete des Lehrstuhls De
- Seite 365 und 366:
Forschungsgebiete des Fachbegebiets
- Seite 367 und 368:
Forschungsgebiete des Lehrstuhls De
- Seite 369 und 370:
Forschungsgebiete des Lehrstuhls Du
- Seite 371 und 372:
Forschungsgebiete des Lehrstuhls Di
- Seite 373 und 374:
Forschungsinteressen des Fachgebiet
- Seite 375 und 376:
1998 - Mitglied des Board of Direct
- Seite 377 und 378:
MITGLIEDER VON AKADEMIEN Ordentlich
- Seite 379 und 380:
Hirzinger, Gerhard (2004) Hegering,
- Seite 381 und 382:
ZWEITMITGLIEDSCHAFTEN IN DER FAKULT
- Seite 383 und 384:
XVII: INDEX Festschrift ,,40 Jahre
- Seite 385 und 386:
Cohen, Henri 96, 231, 232 Conta, Ch
- Seite 387 und 388:
Grau, Albert 11f., 75 Griebel, Mich
- Seite 389 und 390:
Klinker, Gudrun 56, 91, 293, 295, 3
- Seite 391 und 392:
Mußtopf, Günter 11 Navab, Nassir
- Seite 393 und 394:
Schlichter, Johann 55, 282, 285, 29
- Seite 395 und 396:
Weyh 5 Wich(-Walther) 21 Wiehle, Ha
- Seite 397 und 398:
SECHSTER TEIL: ANHANG 383 Festschri
- Seite 399 und 400:
BALDUS, RICHARD ∗1885 †1945, o.
- Seite 401 und 402:
ECKSTEIN, FRANK ∗1938, PD: 1972;
- Seite 403 und 404:
HOMMEL, GÜNTER ∗1944, a.o. Prof.
- Seite 405 und 406:
MEYBERG, KURT ∗1936, WR: 1970; WR
- Seite 407 und 408:
SCHROTT, GERHARD ∗1941, LB: 2000-
- Seite 409 und 410:
HABILITATIONEN UND DISSERTATIONEN (
- Seite 411 und 412:
SCHMIDHUBER,JÜRGEN: Netzwerkarchit
- Seite 413 und 414:
KULISCH, ULRICH: Über eine Methode
- Seite 415 und 416:
WILHELM, REINHARD: Baum-Transformat
- Seite 417 und 418:
ELHARDT, KLAUS: Das Datenbank-Cache
- Seite 419 und 420:
TAUBNER, DIRK: The finite represent
- Seite 421 und 422:
POETZSCH-HEFFTER, ARND: Formale Spe
- Seite 423 und 424:
RICHTER, ROBERT: Persistenz in obje
- Seite 425 und 426:
SCHIEDER, BIRGIT: Logic and Proof M
- Seite 427 und 428:
GRITZNER, THOMAS: wp-Kalkül und re
- Seite 429 und 430:
ARNOLDI, HANS-MARTIN: Korrelationsb
- Seite 431 und 432:
KLEIN, CORNEL: Anforderungsspezifik
- Seite 433 und 434:
LEBERECHT, MARKUS: An Efficient Run
- Seite 435 und 436:
RIDDER, CHRISTOF: Interpretation vo
- Seite 437 und 438:
APPL, MARTIN: Model-Based Reinforce
- Seite 439 und 440:
KIRCHMAIR, CLEMENS: Identifikation
- Seite 441 und 442:
SCHMIDT, ALEXANDER: Eine formale Mo
- Seite 443 und 444:
ZEIDLER,ALFRED: Modellierung Grafis
- Seite 445 und 446:
MAENNEL, OLAF: Handling the Complex
- Seite 447 und 448:
FÜRLINGER, KARL: Scalable Automate
- Seite 449 und 450:
Bauer, F.L.: Entzifferte Geheimniss
- Seite 451 und 452:
Bibel, W.; Jorrand, P. (Eds.): Fund
- Seite 453 und 454:
Brauer, W.; Reisig, W.; Rozenberg,
- Seite 455 und 456:
Broy, M; Steinbrüggen, R. (Eds.):
- Seite 457 und 458:
Ganzha, V.; Vorozhtsov, E.V.: Numer
- Seite 459 und 460:
Hoßfeld, F.; Maehle, E.; Mayr, E.W
- Seite 461 und 462:
Luksch, P.: Parallelisierung ereign
- Seite 463 und 464:
Scheideler, C.: Universal Routing S
- Seite 465 und 466:
XX: WEITERE DATEN Festschrift ,,40
- Seite 467 und 468:
FLÄCHENENTWICKLUNG DER FAKULTÄT F
- Seite 469 und 470:
Im März und April 1998 wurde von d
- Seite 471 und 472:
Int. Summer School on Language Hier
- Seite 473 und 474:
Massively Parallel Inference System
- Seite 475 und 476:
Int. FORTWIHR Conf. 1998 16.03.-18.
- Seite 477 und 478:
LITERATUR ZU ALGOL UND ALGOL-ÜBERS
- Seite 479 und 480:
Personal INFO (-MATH) TUM 1948 —
- Seite 481 und 482:
Bauer, Friedrich L. 1952-1958, 1963
- Seite 483 und 484:
Boetsch, Ernst 1985-1990 Bogdanov,
- Seite 485 und 486:
Bungartz, Hans-Joachim 1991- Bunke,
- Seite 487 und 488:
Dhami, Jeta 2007- Dick, Helga 1995-
- Seite 489 und 490:
Engels, Thomas 1987- Engl, Gabriele
- Seite 491 und 492:
Friede, Dietmar 1980-1985 Friedetzk
- Seite 493 und 494:
Golias, Dimitrios 2000-2004 Goller,
- Seite 495 und 496:
Halfar, Harry 1974-1985 Halfmann, A
- Seite 497 und 498:
Hibsch, Gisela 2006- Hilbig, Matthi
- Seite 499 und 500:
Jahr, Renate 1988-1990 Jain, Domini
- Seite 501 und 502:
Kirchlechner, Bernhard 2004- Kirchm
- Seite 503 und 504:
Kopfmann, Johann 1994-1995 Koppenha
- Seite 505 und 506:
Lagally, Klaus 1969-1975 Lahner, Wa
- Seite 507 und 508:
Linke, Alexandra 1998-2005 Linner,
- Seite 509 und 510:
Mayer, Hermann Georg 2003- Mayer, M
- Seite 511 und 512:
Münch, Andreas 1993-1994 Mundani,
- Seite 513 und 514:
Ott, Michael 2005- Öttl, Franz 198
- Seite 515 und 516:
Preißinger, Jörg 2004- Prenninger
- Seite 517 und 518:
Richter-Gebert, Jürgen 2001- Ricke
- Seite 519 und 520:
Sautter, Stefan 1989-1993 Sautter,
- Seite 521 und 522:
Schneider, Markus 2000- Schneider,
- Seite 523 und 524:
Seibt, Christof 1985-1989 Seibt, Pe
- Seite 525 und 526:
Steinbrüggen, Ralf 1970-2003 Stein
- Seite 527 und 528:
Thiele, Herbert 1976-1978 Thoma, El
- Seite 529 und 530:
Vuong, Anh-Vu 2007- Wachholtz, Ceci
- Seite 531 und 532:
Wild, Johannes 1975-1980 Wildgruber
- Seite 533 und 534:
Zirkel, Martin 1996-2001 Zirngibl,
- Seite 535 und 536:
Böser, Gabriele 1983-1986 Bötsch,
- Seite 537 und 538:
Hommel, Wolfgang 2003- Höß, Diete
- Seite 539 und 540:
Peter, Rudolf 1964-1966, 1971-1972
- Seite 541 und 542:
Turgut, Petra 1991- Urich, Wolfram
- Seite 543 und 544:
Melachrinos Kristina TUM Inf Neuber