Thesis - Tumb1.biblio.tu-muenchen.de
Thesis - Tumb1.biblio.tu-muenchen.de
Thesis - Tumb1.biblio.tu-muenchen.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.6 Messgenauigkeit 85<br />
Der Fehler durch Positionierfehler <strong>de</strong>r Kamera wird zu:<br />
y<br />
∆y =∆x ·<br />
s − c . (59)<br />
Der Fehler steigt mit <strong>de</strong>r Entfernung <strong>de</strong>s Bildpunktes vom Bildmittelpunkt.<br />
Er wird maximal, wenn <strong>de</strong>r Bildpunkt in einer Bil<strong>de</strong>cke liegt,<br />
die einen Abstand von ≈ 30 mm zum Bildmittelpunkt hat. Mit <strong>de</strong>m<br />
obigen Zahlenbeispiel und <strong>de</strong>r Genauigkeit <strong>de</strong>r Traversiereinrich<strong>tu</strong>ng<br />
von ∆x =0, 01 mm ergibt sich ein maximaler Fehler von:<br />
∆y =0, 001 mm.<br />
Der Fehler liegt weit unter <strong>de</strong>r Auflösungsbegrenzung <strong>de</strong>s Systems<br />
und kann damit vernachlässigt wer<strong>de</strong>n.<br />
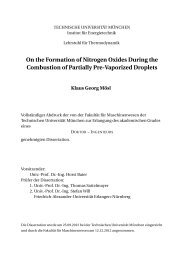
a) b)<br />
x<br />
y<br />
y<br />
y<br />
y<br />
y'<br />
z<br />
y'<br />
c<br />
s obj<br />
c<br />
s obj<br />
Fehler aus Versetzung<br />
in Blickrich<strong>tu</strong>ng<br />
Fehler aus seitlicher Versetzung<br />
Abbildung 29: Abweichungen durch Positionierfehler <strong>de</strong>r Kamera.<br />
Positionierfehler <strong>de</strong>r Kamera zur Seite<br />
Ein Positionsfehler <strong>de</strong>r Kamera ∆z zur Seite o<strong>de</strong>r nach oben<br />
überträgt sich direkt in die Objektebene (vgl. Abb. 29 b). Es gilt:<br />
∆z =∆y. (60)<br />
Die Genauigkeit <strong>de</strong>r Traversiereinrich<strong>tu</strong>ng für Bewegungen senkrecht<br />
zur Kameraachse liegt bei ±0, 02 mm, damit ist <strong>de</strong>r Fehler in <strong>de</strong>r<br />
Objektebene festgelegt:<br />
∆y =∆z ≈ 0, 02mm.