Thesis - Tumb1.biblio.tu-muenchen.de
Thesis - Tumb1.biblio.tu-muenchen.de
Thesis - Tumb1.biblio.tu-muenchen.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.6 Messgenauigkeit 87<br />
a) b)<br />
y<br />
k<br />
y<br />
y<br />
<br />
y<br />
y'<br />
c<br />
y'<br />
c<br />
s obj<br />
Blickrich<strong>tu</strong>ngsfehler<br />
c<br />
s obj<br />
Fehler aus nichtkarthesischer<br />
Ausrich<strong>tu</strong>ng <strong>de</strong>r Kameraachsen<br />
r<br />
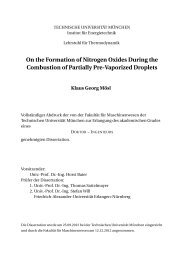
Abbildung 30: Durch Winkelversatz verursachte Fehler: a) Blickrich<strong>tu</strong>ng;<br />
b) nicht karthesische Kameraausrich<strong>tu</strong>ng.<br />
Weiterhin bil<strong>de</strong>t <strong>de</strong>r Sehstrahl mit <strong>de</strong>r verlängerten Kamerakonstanten<br />
auf die Bil<strong>de</strong>bene mit folgen<strong>de</strong>r Vorschrift ab [29]:<br />
y ′ c + k<br />
≈ y ·<br />
s − c − k . (65)<br />
Die Rückgewinnung <strong>de</strong>r Objektposition erfolgt mit <strong>de</strong>r originalen<br />
Konfiguration:<br />
y +∆y = y ′ · s − c . (66)<br />
c<br />
Die Gleichungen 64 bis 66 wer<strong>de</strong>n schrittweise ausgerechnet. Das obige<br />
Zahlenbeispiel zusammen mit ∆ϕ =0, 04 ◦ , <strong>de</strong>r Messgenauigkeit<br />
einer Wasserwaage eingesetzt, ergibt:<br />
∆y =0, 3 mm.<br />
Das System ist äußerst sensitiv gegen eine Abweichung <strong>de</strong>r Blickrich<strong>tu</strong>ng<br />
von ihrer i<strong>de</strong>alen Rich<strong>tu</strong>ng parallel zu <strong>de</strong>n Koordinatenachsen.<br />
Die korrekte Justierung <strong>de</strong>r Traversierschlitten ist daher für das Gelingen<br />
<strong>de</strong>r Zuordnung <strong>de</strong>r einzelnen Blasen im Raum essenziell.