THÃSE - Université Ferhat Abbas de Sétif
THÃSE - Université Ferhat Abbas de Sétif
THÃSE - Université Ferhat Abbas de Sétif

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.6 Contrôle <strong>de</strong> la tension du bus continu<br />
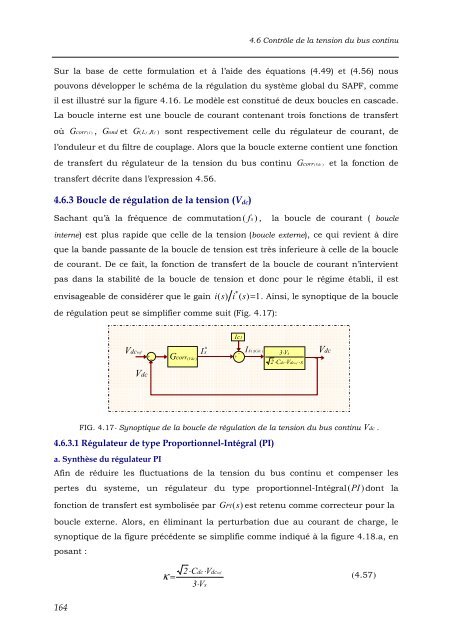
Sur la base <strong>de</strong> cette formulation et à l’ai<strong>de</strong> <strong>de</strong>s équations (4.49) et (4.56) nous<br />
pouvons développer le schéma <strong>de</strong> la régulation du système global du SAPF, comme<br />
il est illustré sur la figure 4.16. Le modèle est constitué <strong>de</strong> <strong>de</strong>ux boucles en casca<strong>de</strong>.<br />
La boucle interne est une boucle <strong>de</strong> courant contenant trois fonctions <strong>de</strong> transfert<br />
où G corr( I ) , Gond<br />
et G ( Lf , R f ) sont respectivement celle du régulateur <strong>de</strong> courant, <strong>de</strong><br />
l’onduleur et du filtre <strong>de</strong> couplage. Alors que la boucle externe contient une fonction<br />
<strong>de</strong> transfert du régulateur <strong>de</strong> la tension du bus continu G corr( V dc ) et la fonction <strong>de</strong><br />
transfert décrite dans l’expression 4.56.<br />
4.6.3 Boucle <strong>de</strong> régulation <strong>de</strong> la tension (V dc )<br />
Sachant qu’à la fréquence <strong>de</strong> commutation ( f s)<br />
, la boucle <strong>de</strong> courant ( boucle<br />
interne) est plus rapi<strong>de</strong> que celle <strong>de</strong> la tension (boucle externe), ce qui revient à dire<br />
que la ban<strong>de</strong> passante <strong>de</strong> la boucle <strong>de</strong> tension est très inferieure à celle <strong>de</strong> la boucle<br />
<strong>de</strong> courant. De ce fait, la fonction <strong>de</strong> transfert <strong>de</strong> la boucle <strong>de</strong> courant n’intervient<br />
pas dans la stabilité <strong>de</strong> la boucle <strong>de</strong> tension et donc pour le régime établi, il est<br />
envisageable <strong>de</strong> considérer que le gain i ( s)<br />
i ( s)<br />
= 1. Ainsi, le synoptique <strong>de</strong> la boucle<br />
<strong>de</strong> régulation peut se simplifier comme suit (Fig. 4.17):<br />
*<br />
Vdcref<br />
+ − Gcorr (Vdc)<br />
∗<br />
Is<br />
Ic1<br />
+ −<br />
Is( ∆Cdc<br />
)<br />
3⋅Vs<br />
2⋅Cdc⋅V<br />
dcref<br />
⋅s<br />
Vdc<br />
Vdc<br />
4.6.3.1 Régulateur <strong>de</strong> type Proportionnel-Intégral (PI)<br />
a. Synthèse du régulateur PI<br />
Afin <strong>de</strong> réduire les fluctuations <strong>de</strong> la tension du bus continu et compenser les<br />
pertes du systeme, un régulateur du type proportionnel-Intégral (PI ) dont la<br />
fonction <strong>de</strong> transfert est symbolisée par GPI(s)<br />
est retenu comme correcteur pour la<br />
boucle externe. Alors, en éliminant la perturbation due au courant <strong>de</strong> charge, le<br />
synoptique <strong>de</strong> la figure précé<strong>de</strong>nte se simplifie comme indiqué à la figure 4.18.a, en<br />
posant :<br />
FIG. 4.17- Synoptique <strong>de</strong> la boucle <strong>de</strong> régulation <strong>de</strong> la tension du bus continu<br />
2 Cdc<br />
Vdcref<br />
V dc .<br />
⋅ ⋅<br />
κ =<br />
(4.57)<br />
3⋅Vs<br />
164