

Le siècle de la voiture intelligente
Laurgeau
Laurgeau

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
158 <strong>Le</strong> Centre <strong>de</strong> robotique a vingt ans<br />
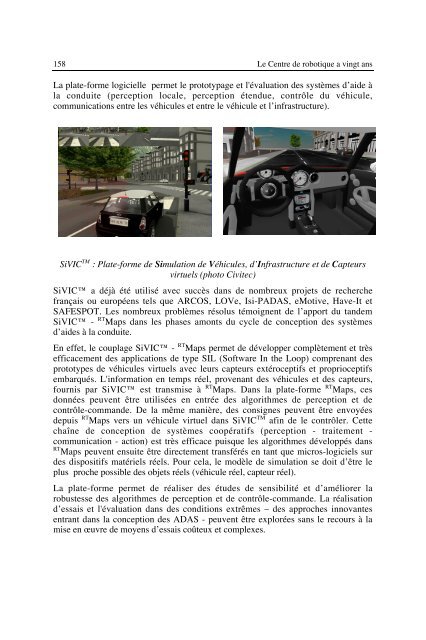
La p<strong>la</strong>te-forme logicielle permet le prototypage et l'évaluation <strong>de</strong>s systèmes d’ai<strong>de</strong> à<br />
<strong>la</strong> conduite (perception locale, perception étendue, contrôle du véhicule,<br />
communications entre les véhicules et entre le véhicule et l’infrastructure).<br />
SiVIC TM : P<strong>la</strong>te-forme <strong>de</strong> Simu<strong>la</strong>tion <strong>de</strong> Véhicules, d’Infrastructure et <strong>de</strong> Capteurs<br />
virtuels (photo Civitec)<br />
SiVIC a déjà été utilisé avec succès dans <strong>de</strong> nombreux projets <strong>de</strong> recherche<br />
français ou européens tels que ARCOS, LOVe, Isi-PADAS, eMotive, Have-It et<br />
SAFESPOT. <strong>Le</strong>s nombreux problèmes résolus témoignent <strong>de</strong> l’apport du tan<strong>de</strong>m<br />
SiVIC - RT Maps dans les phases amonts du cycle <strong>de</strong> conception <strong>de</strong>s systèmes<br />
d’ai<strong>de</strong>s à <strong>la</strong> conduite.<br />
En effet, le coup<strong>la</strong>ge SiVIC - RT Maps permet <strong>de</strong> développer complètement et très<br />
efficacement <strong>de</strong>s applications <strong>de</strong> type SIL (Software In the Loop) comprenant <strong>de</strong>s<br />
prototypes <strong>de</strong> véhicules virtuels avec leurs capteurs extéroceptifs et proprioceptifs<br />
embarqués. L'information en temps réel, provenant <strong>de</strong>s véhicules et <strong>de</strong>s capteurs,<br />
fournis par SiVIC est transmise à RT Maps. Dans <strong>la</strong> p<strong>la</strong>te-forme RT Maps, ces<br />
données peuvent être utilisées en entrée <strong>de</strong>s algorithmes <strong>de</strong> perception et <strong>de</strong><br />
contrôle-comman<strong>de</strong>. De <strong>la</strong> même manière, <strong>de</strong>s consignes peuvent être envoyées<br />
<strong>de</strong>puis RT Maps vers un véhicule virtuel dans SiVIC TM afin <strong>de</strong> le contrôler. Cette<br />
chaîne <strong>de</strong> conception <strong>de</strong> systèmes coopératifs (perception - traitement -<br />
communication - action) est très efficace puisque les algorithmes développés dans<br />
RT Maps peuvent ensuite être directement transférés en tant que micros-logiciels sur<br />
<strong>de</strong>s dispositifs matériels réels. Pour ce<strong>la</strong>, le modèle <strong>de</strong> simu<strong>la</strong>tion se doit d’être le<br />
plus proche possible <strong>de</strong>s objets réels (véhicule réel, capteur réel).<br />
La p<strong>la</strong>te-forme permet <strong>de</strong> réaliser <strong>de</strong>s étu<strong>de</strong>s <strong>de</strong> sensibilité et d’améliorer <strong>la</strong><br />
robustesse <strong>de</strong>s algorithmes <strong>de</strong> perception et <strong>de</strong> contrôle-comman<strong>de</strong>. La réalisation<br />
d’essais et l'évaluation dans <strong>de</strong>s conditions extrêmes – <strong>de</strong>s approches innovantes<br />
entrant dans <strong>la</strong> conception <strong>de</strong>s ADAS - peuvent être explorées sans le recours à <strong>la</strong><br />
mise en œuvre <strong>de</strong> moyens d’essais coûteux et complexes.