

Le siècle de la voiture intelligente
Laurgeau
Laurgeau

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Présentation <strong>de</strong> quelques résultats passés 185<br />
LE SCANNER 3D POUR ENVIRONNEMENT URBAIN<br />
Pour obtenir le modèle géométrique tridimensionnel d'objets <strong>de</strong> très gran<strong>de</strong> taille,<br />
nous avons mis au point dès 2002 une technique innovante que nous avons appelée<br />
« Scanner 3D pour environnement urbain ». <strong>Le</strong> principe consiste à utiliser<br />
simultanément un télémètre et le véhicule Lara qui se dép<strong>la</strong>ce. Au lieu d’exploiter le<br />
télémètre dans un p<strong>la</strong>n horizontal à l’avant comme c’est le cas pour <strong>la</strong> détection <strong>de</strong><br />
véhicules ou <strong>de</strong> piétons, nous l’avons positionné à l’arrière du véhicule et dans un<br />
p<strong>la</strong>n vertical. Lorsque le véhicule se dép<strong>la</strong>ce, les mouvements conjugués <strong>de</strong><br />
trans<strong>la</strong>tion <strong>de</strong> <strong>la</strong> <strong>voiture</strong> et <strong>de</strong> rotation du <strong>la</strong>ser engendrent une hélice <strong>de</strong> points<br />
tridimensionnels.<br />
La difficulté principale est <strong>la</strong> localisation précise du véhicule obtenue par fusion<br />
entre le capteur GPS différentiel (qui délivre une mesure absolue à 10 Hz) et <strong>la</strong><br />
centrale inertielle qui délivre une localisation re<strong>la</strong>tive à l'estime à une fréquence <strong>de</strong><br />
85 Hz.<br />
<strong>Le</strong> mouvement <strong>de</strong> <strong>la</strong> <strong>voiture</strong> n'est pas non plus une simple trans<strong>la</strong>tion à vitesse<br />
constante.<br />
La maîtrise <strong>de</strong>s paramètres espace-temps (qui est le point dur du problème) est<br />
assurée par <strong>la</strong> création <strong>de</strong> bases <strong>de</strong> données datées et synchronisées dans RT MAPS.<br />
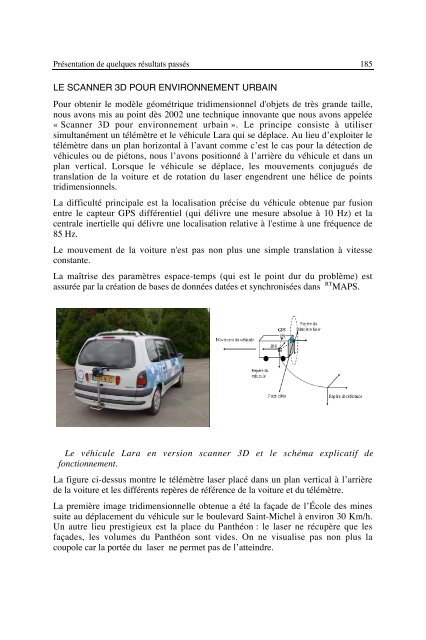
<strong>Le</strong> véhicule Lara en version scanner 3D et le schéma explicatif <strong>de</strong><br />
fonctionnement.<br />
La figure ci-<strong>de</strong>ssus montre le télémètre <strong>la</strong>ser p<strong>la</strong>cé dans un p<strong>la</strong>n vertical à l’arrière<br />
<strong>de</strong> <strong>la</strong> <strong>voiture</strong> et les différents repères <strong>de</strong> référence <strong>de</strong> <strong>la</strong> <strong>voiture</strong> et du télémètre.<br />
La première image tridimensionnelle obtenue a été <strong>la</strong> faça<strong>de</strong> <strong>de</strong> l’École <strong>de</strong>s mines<br />
suite au dép<strong>la</strong>cement du véhicule sur le boulevard Saint-Michel à environ 30 Km/h.<br />
Un autre lieu prestigieux est <strong>la</strong> p<strong>la</strong>ce du Panthéon : le <strong>la</strong>ser ne récupère que les<br />
faça<strong>de</strong>s, les volumes du Panthéon sont vi<strong>de</strong>s. On ne visualise pas non plus <strong>la</strong><br />
coupole car <strong>la</strong> portée du <strong>la</strong>ser ne permet pas <strong>de</strong> l’atteindre.