

Le siècle de la voiture intelligente
Laurgeau
Laurgeau

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
200 <strong>Le</strong> Centre <strong>de</strong> robotique a vingt ans<br />
<strong>Le</strong> protocole OLSR développé par nos partenaires <strong>de</strong> l’INRIA a pu être testé grâce à<br />
<strong>la</strong> flotte <strong>de</strong> C3 communicantes. De même, le protocole IPV6 a été implémenté et<br />
testé avec succès.<br />
La principale innovation a été le concept <strong>de</strong> centre <strong>de</strong> gestion <strong>de</strong> trafic virtuel<br />
décentralisé. Lorsque qu’un réseau VANET est établi, un véhicule maître est<br />
désigné : il collecte les conformations en provenance <strong>de</strong> tous les véhicules <strong>de</strong> réseau<br />
local et assure seul <strong>la</strong> communication avec le serveur régional sur l’infrastructure.<br />
Cette approche qui tire bénéfice d’un écosystème <strong>de</strong> véhicules communicants,<br />
permet <strong>de</strong> réduire <strong>la</strong> ban<strong>de</strong> passante <strong>de</strong>s communications longue distance.<br />
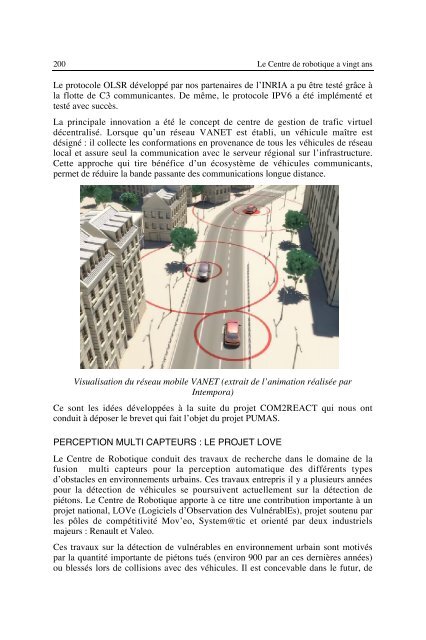
Visualisation du réseau mobile VANET (extrait <strong>de</strong> l’animation réalisée par<br />
Intempora)<br />
Ce sont les idées développées à <strong>la</strong> suite du projet COM2REACT qui nous ont<br />
conduit à déposer le brevet qui fait l’objet du projet PUMAS.<br />
PERCEPTION MULTI CAPTEURS : LE PROJET LOVE<br />
<strong>Le</strong> Centre <strong>de</strong> Robotique conduit <strong>de</strong>s travaux <strong>de</strong> recherche dans le domaine <strong>de</strong> <strong>la</strong><br />
fusion multi capteurs pour <strong>la</strong> perception automatique <strong>de</strong>s différents types<br />
d’obstacles en environnements urbains. Ces travaux entrepris il y a plusieurs années<br />
pour <strong>la</strong> détection <strong>de</strong> véhicules se poursuivent actuellement sur <strong>la</strong> détection <strong>de</strong><br />
piétons. <strong>Le</strong> Centre <strong>de</strong> Robotique apporte à ce titre une contribution importante à un<br />
projet national, LOVe (Logiciels d’Observation <strong>de</strong>s VulnérablEs), projet soutenu par<br />
les pôles <strong>de</strong> compétitivité Mov’eo, System@tic et orienté par <strong>de</strong>ux industriels<br />
majeurs : Renault et Valeo.<br />
Ces travaux sur <strong>la</strong> détection <strong>de</strong> vulnérables en environnement urbain sont motivés<br />
par <strong>la</strong> quantité importante <strong>de</strong> piétons tués (environ 900 par an ces <strong>de</strong>rnières années)<br />
ou blessés lors <strong>de</strong> collisions avec <strong>de</strong>s véhicules. Il est concevable dans le futur, <strong>de</strong>