

Le siècle de la voiture intelligente
Laurgeau
Laurgeau

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Présentation <strong>de</strong> résultats récents ou en cours 203<br />
La principale originalité du système <strong>de</strong> perception Lidar rési<strong>de</strong> dans <strong>la</strong> manière dont<br />
sont traitées les données brutes associées aux objets pistés. En effet, les données<br />
sommaires issues du Lidar ne permettent pas a priori une c<strong>la</strong>ssification précise <strong>de</strong>s<br />
objets. Toutefois notre algorithme <strong>de</strong> reconnaissance permet d’effectuer une<br />
reconnaissance <strong>de</strong>s piétons et <strong>de</strong>s groupes <strong>de</strong> piétons avec une précision qui peut<br />
atteindre 70%.<br />
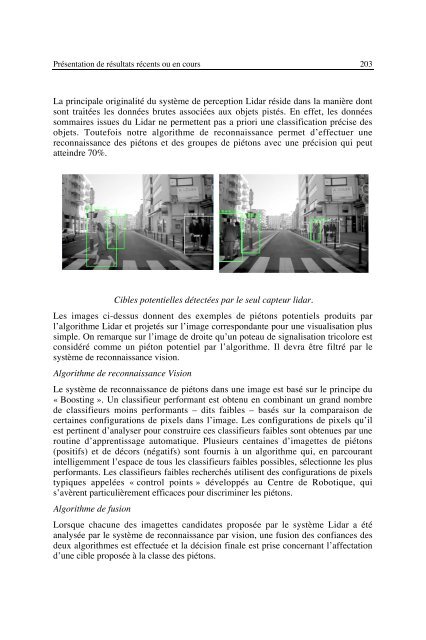
Cibles potentielles détectées par le seul capteur lidar.<br />
<strong>Le</strong>s images ci-<strong>de</strong>ssus donnent <strong>de</strong>s exemples <strong>de</strong> piétons potentiels produits par<br />
l’algorithme Lidar et projetés sur l’image correspondante pour une visualisation plus<br />
simple. On remarque sur l’image <strong>de</strong> droite qu’un poteau <strong>de</strong> signalisation tricolore est<br />
considéré comme un piéton potentiel par l’algorithme. Il <strong>de</strong>vra être filtré par le<br />
système <strong>de</strong> reconnaissance vision.<br />
Algorithme <strong>de</strong> reconnaissance Vision<br />
<strong>Le</strong> système <strong>de</strong> reconnaissance <strong>de</strong> piétons dans une image est basé sur le principe du<br />
« Boosting ». Un c<strong>la</strong>ssifieur performant est obtenu en combinant un grand nombre<br />
<strong>de</strong> c<strong>la</strong>ssifieurs moins performants – dits faibles – basés sur <strong>la</strong> comparaison <strong>de</strong><br />
certaines configurations <strong>de</strong> pixels dans l’image. <strong>Le</strong>s configurations <strong>de</strong> pixels qu’il<br />
est pertinent d’analyser pour construire ces c<strong>la</strong>ssifieurs faibles sont obtenues par une<br />
routine d’apprentissage automatique. Plusieurs centaines d’imagettes <strong>de</strong> piétons<br />
(positifs) et <strong>de</strong> décors (négatifs) sont fournis à un algorithme qui, en parcourant<br />
intelligemment l’espace <strong>de</strong> tous les c<strong>la</strong>ssifieurs faibles possibles, sélectionne les plus<br />
performants. <strong>Le</strong>s c<strong>la</strong>ssifieurs faibles recherchés utilisent <strong>de</strong>s configurations <strong>de</strong> pixels<br />
typiques appelées « control points » développés au Centre <strong>de</strong> Robotique, qui<br />
s’avèrent particulièrement efficaces pour discriminer les piétons.<br />
Algorithme <strong>de</strong> fusion<br />
Lorsque chacune <strong>de</strong>s imagettes candidates proposée par le système Lidar a été<br />
analysée par le système <strong>de</strong> reconnaissance par vision, une fusion <strong>de</strong>s confiances <strong>de</strong>s<br />
<strong>de</strong>ux algorithmes est effectuée et <strong>la</strong> décision finale est prise concernant l’affectation<br />
d’une cible proposée à <strong>la</strong> c<strong>la</strong>sse <strong>de</strong>s piétons.