

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
OK<br />
SF<br />
HPE<br />
ES<br />
1 2 3<br />
R<br />
LAN<br />
HD<br />
R<br />
SW1<br />
1 2 3 4<br />
ON<br />
OFF<br />
XDIO<br />
1.1<br />
IEEE-1394<br />
1.2<br />
XUSR<br />
Device Net<br />
Eth 10/100<br />
XSYS<br />
XFP<br />
RS-232/TERM<br />
XMCP<br />
RS-422/485<br />
*S/N 3561-XXXXX*<br />
XDC1 XDC2<br />
24V 5A<br />
GND<br />
+24V<br />
DC INPUT<br />
(24 VDC)<br />
GND<br />
+24V<br />
DC INPUT<br />
(24 VDC)<br />
AC INPUT<br />
(200-240 VAC 1Φ)<br />
AC INPUT<br />
(200-240 VAC 1Φ)<br />
XIO<br />
XIO<br />
XSLV<br />
XSLV<br />
XPANEL<br />
XPANEL<br />
1<br />
2<br />
SmartServo<br />
RS-232<br />
1<br />
2<br />
SmartServo<br />
RS-232<br />
Dual <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> Systems 11<br />
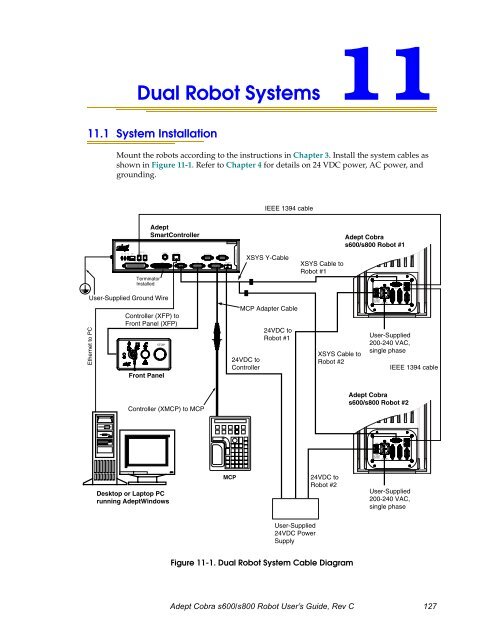
11.1 System Installation<br />
Mount the robots according to the ins<strong>tr</strong>uctions in Chapter 3. Install the system cables as<br />
shown in Figure 11-1. Refer to Chapter 4 for details on 24 VDC power, AC power, and<br />
grounding.<br />
IEEE 1394 cable<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong><br />
SmartCon<strong>tr</strong>oller<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong><br />
<s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #1<br />
Terminator<br />
Installed<br />
- + - +<br />
SmartCon<strong>tr</strong>oller CS<br />
XSYS Y-Cable<br />
XSYS Cable to<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #1<br />
User-Supplied Ground Wire<br />
Ethernet to PC<br />
Con<strong>tr</strong>oller (XFP) to<br />
Front Panel (XFP)<br />
STOP<br />
Front Panel<br />
MCP Adapter Cable<br />
24VDC to<br />
Con<strong>tr</strong>oller<br />
24VDC to<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #1<br />
XSYS Cable to<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #2<br />
User-Supplied<br />
200-240 VAC,<br />
single phase<br />
IEEE 1394 cable<br />
Con<strong>tr</strong>oller (XMCP) to MCP<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong><br />
<s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #2<br />
-+<br />
Desktop or Laptop PC<br />
running <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong>Windows<br />
MCP<br />
24VDC to<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> #2<br />
User-Supplied<br />
200-240 VAC,<br />
single phase<br />
User-Supplied<br />
24VDC Power<br />
Supply<br />
Figure 11-1. Dual <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> System Cable Diagram<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C 127













