

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 6 - Optional Equipment Installation<br />
6.4 Internal User Connectors<br />
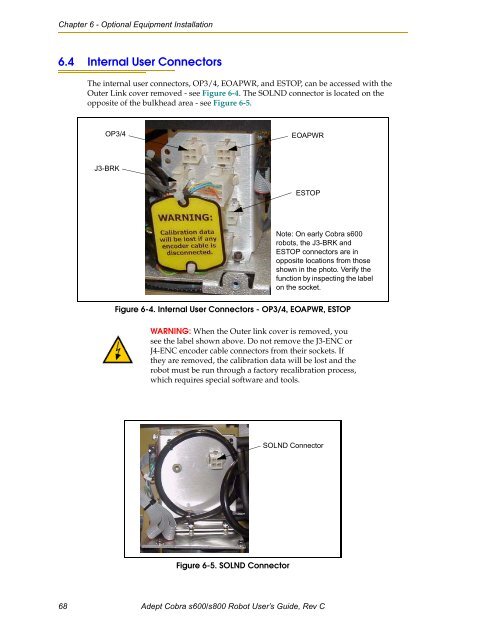
The internal user connectors, OP3/4, EOAPWR, and ESTOP, can be accessed with the<br />
Outer Link cover removed - see Figure 6-4. The SOLND connector is located on the<br />
opposite of the bulkhead area - see Figure 6-5.<br />
OP3/4<br />
EOAPWR<br />
J3-BRK<br />
ESTOP<br />
Note: On early <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong><br />
robots, the J3-BRK and<br />
ESTOP connectors are in<br />
opposite locations from those<br />
shown in the photo. Verify the<br />
function by inspecting the label<br />
on the socket.<br />
Figure 6-4. Internal User Connectors - OP3/4, EOAPWR, ESTOP<br />
WARNING: When the Outer link cover is removed, you<br />
see the label shown above. Do not remove the J3-ENC or<br />
J4-ENC encoder cable connectors from their sockets. If<br />
they are removed, the calibration data will be lost and the<br />
robot must be run through a factory recalibration process,<br />
which requires special software and tools.<br />
SOLND Connector<br />
Figure 6-5. SOLND Connector<br />
68 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C













