

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Installing Adjustable Hardstops<br />
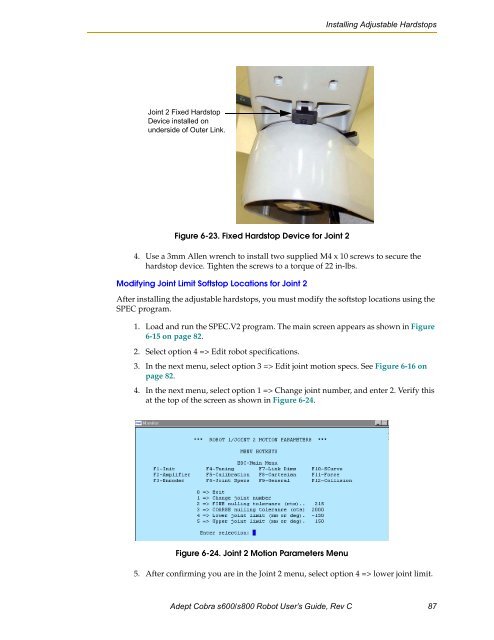
Joint 2 Fixed Hardstop<br />
Device installed on<br />
underside of Outer Link.<br />
Figure 6-23. Fixed Hardstop Device for Joint 2<br />
4. Use a 3mm Allen wrench to install two supplied M4 x 10 screws to secure the<br />
hardstop device. Tighten the screws to a torque of 22 in-lbs.<br />
Modifying Joint Limit Softstop Locations for Joint 2<br />
After installing the adjustable hardstops, you must modify the softstop locations using the<br />
SPEC program.<br />
1. Load and run the SPEC.V2 program. The main screen appears as shown in Figure<br />
6-15 on page 82.<br />
2. Select option 4 => Edit robot specifications.<br />
3. In the next menu, select option 3 => Edit joint motion specs. See Figure 6-16 on<br />
page 82.<br />
4. In the next menu, select option 1 => Change joint number, and enter 2. Verify this<br />
at the top of the screen as shown in Figure 6-24.<br />
Figure 6-24. Joint 2 Motion Parameters Menu<br />
5. After confirming you are in the Joint 2 menu, select option 4 => lower joint limit.<br />
<s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C 87













