

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
GND<br />
+24V<br />
DC INPUT<br />
(24 VDC)<br />
AC INPUT<br />
(200-240 VAC 1Φ) XIO<br />
XSLV<br />
XPANEL<br />
1<br />
2<br />
SmartServo<br />
RS-232<br />
OK<br />
SF<br />
HPE<br />
ES<br />
1 2 3<br />
R<br />
LINK<br />
R<br />
LAN<br />
HD<br />
OK SF<br />
SW1<br />
1 2 3 4<br />
IEEE-1394<br />
1.1 1.2<br />
ON<br />
OFF<br />
XDIO<br />
1.1<br />
IEEE-1394<br />
1.2<br />
X1<br />
XUSR<br />
Device Net<br />
Eth 10/100<br />
X2<br />
XSYS<br />
X3<br />
XFP<br />
RS-232/TERM<br />
X4<br />
XMCP<br />
RS-422/485<br />
*S/N 3563-XXXXX*<br />
XDC1 XDC2<br />
24V 0.5A<br />
*S/N 3561-XXXXX*<br />
XDC1 XDC2<br />
24V 5A<br />
- + - +<br />
Chapter 5 - System Operation<br />
5.4 Connecting Digital I/O to the System<br />
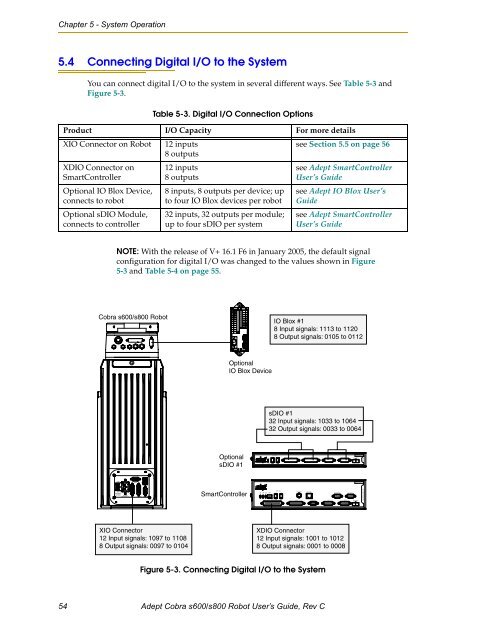
You can connect digital I/O to the system in several different ways. See Table 5-3 and<br />
Figure 5-3.<br />
Table 5-3. Digital I/O Connection Options<br />
Product I/O Capacity For more details<br />
XIO Connector on <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong><br />
XDIO Connector on<br />
SmartCon<strong>tr</strong>oller<br />
Optional IO Blox Device,<br />
connects to robot<br />
Optional sDIO Module,<br />
connects to con<strong>tr</strong>oller<br />
12 inputs<br />
8 outputs<br />
12 inputs<br />
8 outputs<br />
8 inputs, 8 outputs per device; up<br />
to four IO Blox devices per robot<br />
32 inputs, 32 outputs per module;<br />
up to four sDIO per system<br />
see Section 5.5 on page 56<br />
see <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> SmartCon<strong>tr</strong>oller<br />
User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong><br />
see <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> IO Blox User’s<br />
<s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong><br />
see <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> SmartCon<strong>tr</strong>oller<br />
User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong><br />
NOTE: With the release of V+ 16.1 F6 in January 2005, the default signal<br />
configuration for digital I/O was changed to the values shown in Figure<br />
5-3 and Table 5-4 on page 55.<br />
<s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong><br />
IO Blox #1<br />
8 Input signals: 1113 to 1120<br />
8 Output signals: 0105 to 0112<br />
Optional<br />
IO Blox Device<br />
sDIO #1<br />
32 Input signals: 1033 to 1064<br />
32 Output signals: 0033 to 0064<br />
Optional<br />
sDIO #1<br />
- + - +<br />
SC-DIO<br />
SmartCon<strong>tr</strong>oller<br />
SmartCon<strong>tr</strong>oller CS<br />
XIO Connector<br />
12 Input signals: 1097 to 1108<br />
8 Output signals: 0097 to 0104<br />
XDIO Connector<br />
12 Input signals: 1001 to 1012<br />
8 Output signals: 0001 to 0008<br />
Figure 5-3. Connecting Digital I/O to the System<br />
54 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C













