

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 11 - Dual <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> Systems<br />
sDIO-1<br />
sDIO-2<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 1 XIO<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 1<br />
IO Blox<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 2 XIO<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 2<br />
IO Blox<br />
sDIO-1<br />
sDIO-2<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 1 XIO<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 1<br />
IO Blox<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 2 XIO<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 2<br />
IO Blox<br />
<s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> 1 & 2<br />
Internal<br />
Outputs<br />
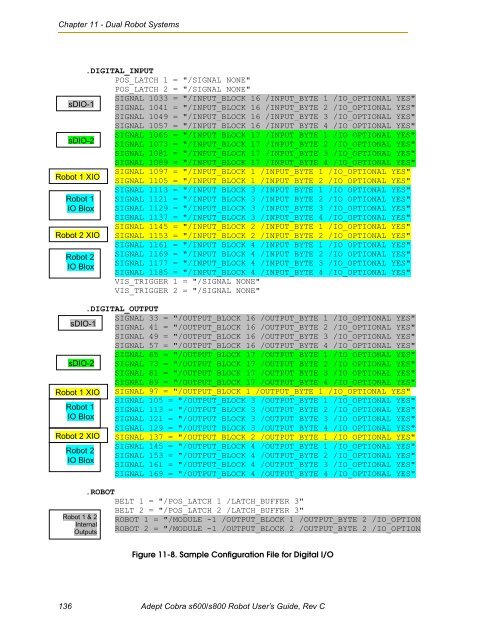
.DIGITAL_INPUT<br />
POS_LATCH 1 = "/SIGNAL NONE"<br />
POS_LATCH 2 = "/SIGNAL NONE"<br />
SIGNAL 1033 = "/INPUT_BLOCK 16 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1041 = "/INPUT_BLOCK 16 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1049 = "/INPUT_BLOCK 16 /INPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 1057 = "/INPUT_BLOCK 16 /INPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 1065 = "/INPUT_BLOCK 17 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1073 = "/INPUT_BLOCK 17 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1081 = "/INPUT_BLOCK 17 /INPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 1089 = "/INPUT_BLOCK 17 /INPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 1097 = "/INPUT_BLOCK 1 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1105 = "/INPUT_BLOCK 1 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1113 = "/INPUT_BLOCK 3 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1121 = "/INPUT_BLOCK 3 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1129 = "/INPUT_BLOCK 3 /INPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 1137 = "/INPUT_BLOCK 3 /INPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 1145 = "/INPUT_BLOCK 2 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1153 = "/INPUT_BLOCK 2 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1161 = "/INPUT_BLOCK 4 /INPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 1169 = "/INPUT_BLOCK 4 /INPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 1177 = "/INPUT_BLOCK 4 /INPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 1185 = "/INPUT_BLOCK 4 /INPUT_BYTE 4 /IO_OPTIONAL YES"<br />
VIS_TRIGGER 1 = "/SIGNAL NONE"<br />
VIS_TRIGGER 2 = "/SIGNAL NONE"<br />
.DIGITAL_OUTPUT<br />
SIGNAL 33 = "/OUTPUT_BLOCK 16 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 41 = "/OUTPUT_BLOCK 16 /OUTPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 49 = "/OUTPUT_BLOCK 16 /OUTPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 57 = "/OUTPUT_BLOCK 16 /OUTPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 65 = "/OUTPUT_BLOCK 17 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 73 = "/OUTPUT_BLOCK 17 /OUTPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 81 = "/OUTPUT_BLOCK 17 /OUTPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 89 = "/OUTPUT_BLOCK 17 /OUTPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 97 = "/OUTPUT_BLOCK 1 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 105 = "/OUTPUT_BLOCK 3 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 113 = "/OUTPUT_BLOCK 3 /OUTPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 121 = "/OUTPUT_BLOCK 3 /OUTPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 129 = "/OUTPUT_BLOCK 3 /OUTPUT_BYTE 4 /IO_OPTIONAL YES"<br />
SIGNAL 137 = "/OUTPUT_BLOCK 2 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 145 = "/OUTPUT_BLOCK 4 /OUTPUT_BYTE 1 /IO_OPTIONAL YES"<br />
SIGNAL 153 = "/OUTPUT_BLOCK 4 /OUTPUT_BYTE 2 /IO_OPTIONAL YES"<br />
SIGNAL 161 = "/OUTPUT_BLOCK 4 /OUTPUT_BYTE 3 /IO_OPTIONAL YES"<br />
SIGNAL 169 = "/OUTPUT_BLOCK 4 /OUTPUT_BYTE 4 /IO_OPTIONAL YES"<br />
.ROBOT<br />
BELT 1 = "/POS_LATCH 1 /LATCH_BUFFER 3"<br />
BELT 2 = "/POS_LATCH 2 /LATCH_BUFFER 3"<br />
ROBOT 1 = "/MODULE -1 /OUTPUT_BLOCK 1 /OUTPUT_BYTE 2 /IO_OPTIONA<br />
ROBOT 2 = "/MODULE -1 /OUTPUT_BLOCK 2 /OUTPUT_BYTE 2 /IO_OPTIONA<br />
Figure 11-8. Sample Configuration File for Digital I/O<br />
136 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C













