

Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr
Adept Cobra s600/s800 Robot User's Guide - pulsar.com.tr

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 11 - Dual <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> Systems<br />
11.5 Using CONFIG_C to Configure I/O<br />
If you purchased both robots at the same time as part of a Dual <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> system, then the<br />
two robots will be set up at the factory for the correct I/O configuration.<br />
If you are setting up a system that was not configured at the factory, or <s<strong>tr</strong>ong>com</s<strong>tr</strong>ong>bining two<br />
formerly single robots, then you will need to go through the configuration process.<br />
There are two methods for configuring the I/O:<br />
• IO configuration by editing system file<br />
• IO configuration by importing pre-configured file<br />
IO Configuration by Editing System File<br />
This procedure provides details of configuring the I/O to support the XIO and solenoid<br />
value option.<br />
1. Load \util\config_c<br />
2. Exe 1 a.config_c<br />
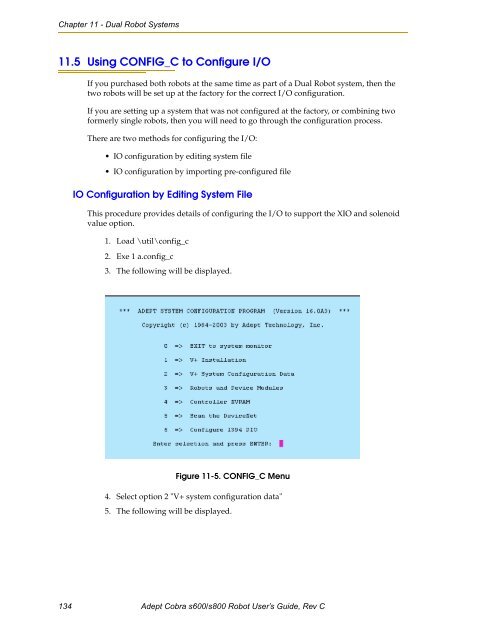
3. The following will be displayed.<br />
Figure 11-5. CONFIG_C Menu<br />
4. Select option 2 "V+ system configuration data"<br />
5. The following will be displayed.<br />
134 <s<strong>tr</strong>ong>Adept</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Cobra</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>s600</s<strong>tr</strong>ong>/<s<strong>tr</strong>ong>s800</s<strong>tr</strong>ong> <s<strong>tr</strong>ong>Robot</s<strong>tr</strong>ong> User’s <s<strong>tr</strong>ong>Guide</s<strong>tr</strong>ong>, Rev C













