

Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
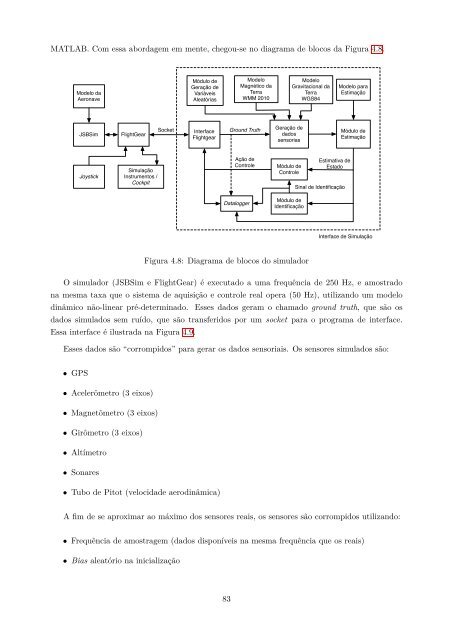
MATLAB. Com essa abordagem em mente, chegou-se no diagrama <strong>de</strong> blocos da Figura 4.8.<br />
Mo<strong>de</strong>lo da<br />
Aeronave<br />
Módulo <strong>de</strong><br />
Geração <strong>de</strong><br />
Variáveis<br />
Aleatórias<br />
Mo<strong>de</strong>lo<br />
Magnético da<br />
Terra<br />
WMM 2010<br />
Mo<strong>de</strong>lo<br />
Gravitacional da<br />
Terra<br />
WGS84<br />
Mo<strong>de</strong>lo para<br />
Estimação<br />
JSBSim<br />
FlightGear<br />
Socket<br />
Interface<br />
Flightgear<br />
Ground Truth<br />
Geração <strong>de</strong><br />
dados<br />
sensorias<br />
Módulo <strong>de</strong><br />
Estimação<br />
Joystick<br />
Simulação<br />
Instr<strong>um</strong>entos /<br />
Cockpit<br />
Ação <strong>de</strong><br />
Controle<br />
Módulo <strong>de</strong><br />
Controle<br />
Estimativa <strong>de</strong><br />
Estado<br />
Sinal <strong>de</strong> I<strong>de</strong>ntificação<br />
Datalogger<br />
Módulo <strong>de</strong><br />
I<strong>de</strong>ntificação<br />
Interface <strong>de</strong> Simulação<br />
Figura 4.8: Diagrama <strong>de</strong> blocos do simulador<br />
O simulador (JSBSim e FlightGear) é executado a <strong>um</strong>a frequência <strong>de</strong> 250 Hz, e amostrado<br />
na mesma taxa que o sistema <strong>de</strong> aquisição e controle real opera (50 Hz), utilizando <strong>um</strong> mo<strong>de</strong>lo<br />
dinâmico não-linear pré-<strong>de</strong>terminado. Esses dados geram o chamado ground truth, que são os<br />
dados simulados sem ruído, que são transferidos por <strong>um</strong> socket para o programa <strong>de</strong> interface.<br />
Essa interface é ilustrada na Figura 4.9.<br />
Esses dados são “corrompidos” para gerar os dados sensoriais. Os sensores simulados são:<br />
• GPS<br />
• Acelerômetro (3 eixos)<br />
• Magnetômetro (3 eixos)<br />
• Girômetro (3 eixos)<br />
• Altímetro<br />
• Sonares<br />
• Tubo <strong>de</strong> Pitot (velocida<strong>de</strong> aerodinâmica)<br />
A fim <strong>de</strong> se aproximar ao máximo dos sensores reais, os sensores são corrompidos utilizando:<br />
• Frequência <strong>de</strong> amostragem (dados disponíveis na mesma frequência que os reais)<br />
• Bias aleatório na inicialização<br />
83













