

Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
EKF mostrava a mesma variância em torno do valor real.<br />
Porém, o segundo estágio <strong>de</strong> simulação surpreen<strong>de</strong>u muito - ambos os estimadores divergiam<br />
com parâmetros que funcionavam bem na primeira simulação. Muitos ajustes nas matrizes Q e R<br />
foram necessários para atingir a estabilida<strong>de</strong>, e mesmo assim os resultados não foram satisfatórios<br />
- em alg<strong>um</strong>as situações, o erro chegava a mais <strong>de</strong> 10 graus entre o estado real e o estado estimado.<br />
A fim <strong>de</strong> tentar contornar esse problema, foram implementados diversos filtros <strong>de</strong> medidas a<br />
fim <strong>de</strong> remover possíveis outliers e forma <strong>de</strong> <strong>de</strong>teção <strong>de</strong> divergência para evitar a <strong>de</strong>generação do<br />
filtro em <strong>um</strong>a situação real. Mesmo assim, os filtros ainda ficaram extremamente sensíveis em<br />
simulação, funcionando apenas para <strong>um</strong> conjunto muito particular <strong>de</strong> parâmetros.<br />
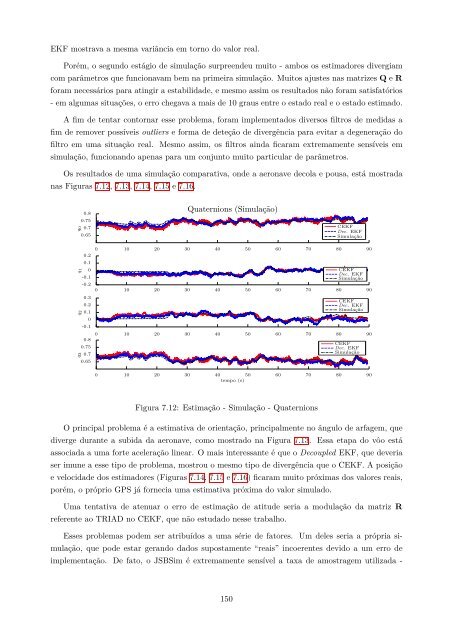
Os resultados <strong>de</strong> <strong>um</strong>a simulação comparativa, on<strong>de</strong> a aeronave <strong>de</strong>cola e pousa, está mostrada<br />
nas Figuras 7.12, 7.13, 7.14, 7.15 e 7.16.<br />
q0<br />
0.8<br />
0.75<br />
0.7<br />
0.65<br />
Quaternions (Simulação)<br />
CEKF<br />
Dec. EKF<br />
Simulação<br />
q1<br />
q2<br />
q3<br />
0.2<br />
0.1<br />
0<br />
-0.1<br />
-0.2<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
-0.1<br />
0.8<br />
0.75<br />
0.7<br />
0.65<br />
0 10 20 30 40 50 60 70 80 90<br />
CEKF<br />
Dec. EKF<br />
Simulação<br />
0 10 20 30 40 50 60 70 80 90<br />
CEKF<br />
Dec. EKF<br />
Simulação<br />
0 10 20 30 40 50 60 70 80 90<br />
CEKF<br />
Dec. EKF<br />
Simulação<br />
0 10 20 30 40 50 60 70 80 90<br />
tempo (s)<br />
Figura 7.12: Estimação - Simulação - Quaternions<br />
O principal problema é a estimativa <strong>de</strong> orientação, principalmente no ângulo <strong>de</strong> arfagem, que<br />
diverge durante a subida da aeronave, como mostrado na Figura 7.13. Essa etapa do vôo está<br />
associada a <strong>um</strong>a forte aceleração linear. O mais interessante é que o Decoupled EKF, que <strong>de</strong>veria<br />
ser imune a esse tipo <strong>de</strong> problema, mostrou o mesmo tipo <strong>de</strong> divergência que o CEKF. A posição<br />
e velocida<strong>de</strong> dos estimadores (Figuras 7.14, 7.15 e 7.16) ficaram muito próximas dos valores reais,<br />
porém, o próprio GPS já fornecia <strong>um</strong>a estimativa próxima do valor simulado.<br />
Uma tentativa <strong>de</strong> atenuar o erro <strong>de</strong> estimação <strong>de</strong> atitu<strong>de</strong> seria a modulação da matriz R<br />
referente ao TRIAD no CEKF, que não estudado nesse trabalho.<br />
Esses problemas po<strong>de</strong>m ser atribuídos a <strong>um</strong>a série <strong>de</strong> fatores. Um <strong>de</strong>les seria a própria simulação,<br />
que po<strong>de</strong> estar gerando dados supostamente “reais” incoerentes <strong>de</strong>vido a <strong>um</strong> erro <strong>de</strong><br />
implementação. De fato, o JSBSim é extremamente sensível a taxa <strong>de</strong> amostragem utilizada -<br />
150













