

Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...
Desenvolvimento de um VeÃculo Aéreo Não-Tripulado - LARA ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
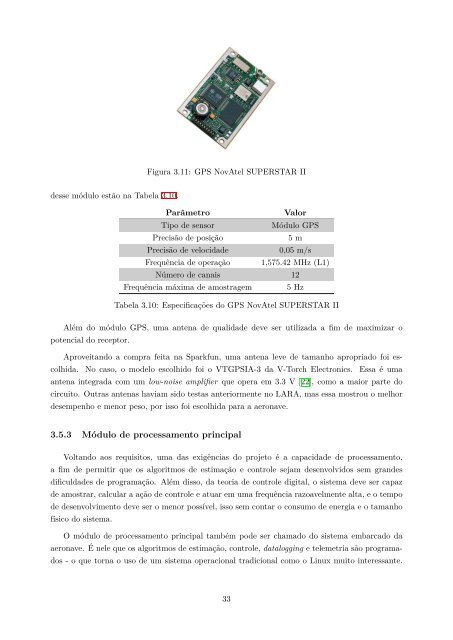
Figura 3.11: GPS NovAtel SUPERSTAR II<br />
<strong>de</strong>sse módulo estão na Tabela 3.10.<br />
Parâmetro<br />
Valor<br />
Tipo <strong>de</strong> sensor<br />
Módulo GPS<br />
Precisão <strong>de</strong> posição<br />
5 m<br />
Precisão <strong>de</strong> velocida<strong>de</strong><br />
0,05 m/s<br />
Frequência <strong>de</strong> operação 1,575.42 MHz (L1)<br />
Número <strong>de</strong> canais 12<br />
Frequência máxima <strong>de</strong> amostragem 5 Hz<br />
Tabela 3.10: Especificações do GPS NovAtel SUPERSTAR II<br />
Além do módulo GPS, <strong>um</strong>a antena <strong>de</strong> qualida<strong>de</strong> <strong>de</strong>ve ser utilizada a fim <strong>de</strong> maximizar o<br />
potencial do receptor.<br />
Aproveitando a compra feita na Sparkfun, <strong>um</strong>a antena leve <strong>de</strong> tamanho apropriado foi escolhida.<br />
No caso, o mo<strong>de</strong>lo escolhido foi o VTGPSIA-3 da V-Torch Electronics. Essa é <strong>um</strong>a<br />
antena integrada com <strong>um</strong> low-noise amplifier que opera em 3.3 V [22], como a maior parte do<br />
circuito. Outras antenas haviam sido testas anteriormente no <strong>LARA</strong>, mas essa mostrou o melhor<br />
<strong>de</strong>sempenho e menor peso, por isso foi escolhida para a aeronave.<br />
3.5.3 Módulo <strong>de</strong> processamento principal<br />
Voltando aos requisitos, <strong>um</strong>a das exigências do projeto é a capacida<strong>de</strong> <strong>de</strong> processamento,<br />
a fim <strong>de</strong> permitir que os algoritmos <strong>de</strong> estimação e controle sejam <strong>de</strong>senvolvidos sem gran<strong>de</strong>s<br />
dificulda<strong>de</strong>s <strong>de</strong> programação. Além disso, da teoria <strong>de</strong> controle digital, o sistema <strong>de</strong>ve ser capaz<br />
<strong>de</strong> amostrar, calcular a ação <strong>de</strong> controle e atuar em <strong>um</strong>a frequência razoavelmente alta, e o tempo<br />
<strong>de</strong> <strong>de</strong>senvolvimento <strong>de</strong>ve ser o menor possível, isso sem contar o cons<strong>um</strong>o <strong>de</strong> energia e o tamanho<br />
físico do sistema.<br />
O módulo <strong>de</strong> processamento principal também po<strong>de</strong> ser chamado do sistema embarcado da<br />
aeronave. É nele que os algoritmos <strong>de</strong> estimação, controle, datalogging e telemetria são programados<br />
- o que torna o uso <strong>de</strong> <strong>um</strong> sistema operacional tradicional como o Linux muito interessante.<br />
33













