

Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
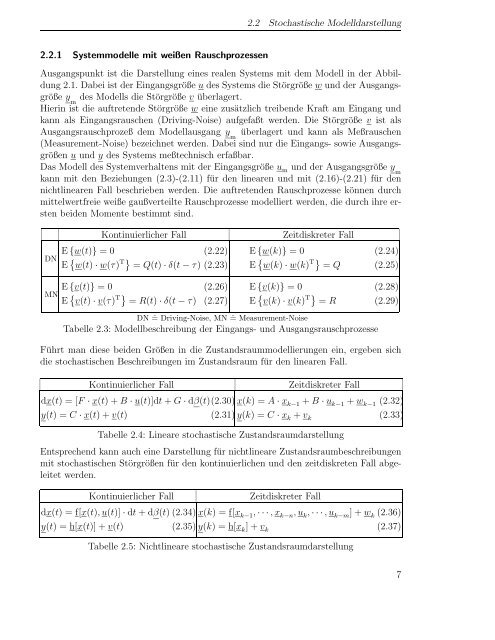
2.2 Stochastische Modelldarstellung<br />
2.2.1 Systemmodelle mit weißen Rauschprozessen<br />
Ausgangspunkt ist die Darstellung eines realen Systems mit dem Modell in der Abbildung<br />
2.1. Dabei ist der Eingangsgröße u des Systems die Störgröße w und der Ausgangsgröße<br />
y m<br />
des Modells die Störgröße v überlagert.<br />
Hierin ist die auftretende Störgröße w eine zusätzlich treibende Kraft am Eingang und<br />
kann als Eingangsrauschen (Driving-Noise) aufgefaßt werden. Die Störgröße v ist als<br />
Ausgangsrauschprozeß dem Modellausgang y m überlagert und kann als Meßrauschen<br />
(Measurement-Noise) bezeichnet werden. Dabei sind nur die Eingangs- sowie Ausgangsgrößen<br />
u und y des Systems meßtechnisch erfaßbar.<br />
Das Modell des Systemverhaltens mit der Eingangsgröße u m und der Ausgangsgröße y m<br />
kann mit den Beziehungen (2.3)-(2.11) für den linearen und mit (2.16)-(2.21) für den<br />
nichtlinearen Fall beschrieben werden. Die auftretenden Rauschprozesse können durch<br />
mittelwertfreie weiße gaußverteilte Rauschprozesse modelliert werden, die durch ihre ersten<br />
beiden Momente bestimmt sind.<br />
DN<br />
MN<br />
Kontinuierlicher Fall<br />
E {w(t)} =0 (2.22)<br />
E { w(t) · w(τ) T} = Q(t) · δ(t − τ) (2.23)<br />
E {v(t)} =0 (2.26)<br />
E { v(t) · v(τ) T} = R(t) · δ(t − τ) (2.27)<br />
Zeitdiskreter Fall<br />
E {w(k)} =0 (2.24)<br />
E { w(k) · w(k) T} = Q (2.25)<br />
E {v(k)} =0 (2.28)<br />
E { v(k) · v(k) T} = R (2.29)<br />
DN ˆ= Driving-Noise, MN ˆ= Measurement-Noise<br />
Tabelle 2.3: Modellbeschreibung der Eingangs- und Ausgangsrauschprozesse<br />
Führt man diese beiden Größen in die Zustandsraummodellierungen ein, ergeben sich<br />
die stochastischen Beschreibungen im Zustandsraum für den linearen Fall.<br />
Kontinuierlicher Fall<br />
Zeitdiskreter Fall<br />
dx(t) =[F · x(t)+B · u(t)]dt + G · dβ(t)(2.30) x(k) =A · x k−1 + B · u k−1 + w k−1 (2.32)<br />
y(t) =C · x(t)+v(t) (2.31) y(k) =C · x k + v k (2.33)<br />
Tabelle 2.4: Lineare stochastische Zustandsraumdarstellung<br />
Entsprechend kann auch eine Darstellung für nichtlineare Zustandsraumbeschreibungen<br />
mit stochastischen Störgrößen für den kontinuierlichen und den zeitdiskreten Fall abgeleitet<br />
werden.<br />
Kontinuierlicher Fall<br />
Zeitdiskreter Fall<br />
dx(t) =f[x(t),u(t)] · dt +dβ(t) (2.34) x(k) =f[x k−1 , ···,x k−n ,u k , ···,u k−m ]+w k (2.36)<br />
y(t) =h[x(t)] + v(t) (2.35) y(k) =h[x k ]+v k (2.37)<br />
Tabelle 2.5: Nichtlineare stochastische Zustandsraumdarstellung<br />
7













