

Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen
Dokument 1.pdf - Universität Siegen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5 Lineare Parameteridentifikationsverfahren<br />
w(k)<br />
u(k)<br />
System<br />
y = C · x + w<br />
y(k)<br />
z −1 y(k − 1)<br />
Identifikation<br />
Tiefpaß<br />
Filter<br />
ˆx + m(k)<br />
ˆx + (k)<br />
Kalman-Filter<br />
C =<br />
[<br />
−Y k U k Ŵ k ]<br />
Modell<br />
y H (k)<br />
z −1 y H (k − 1)<br />
y H = C H · ˆx + m<br />
y m = C · ˆx + y<br />
m (k) ŵ(k)<br />
<br />
z −1 ŵ(k − 1) Hilfsvariable<br />
C H =[−Y k H U k 0]<br />
u(k)<br />
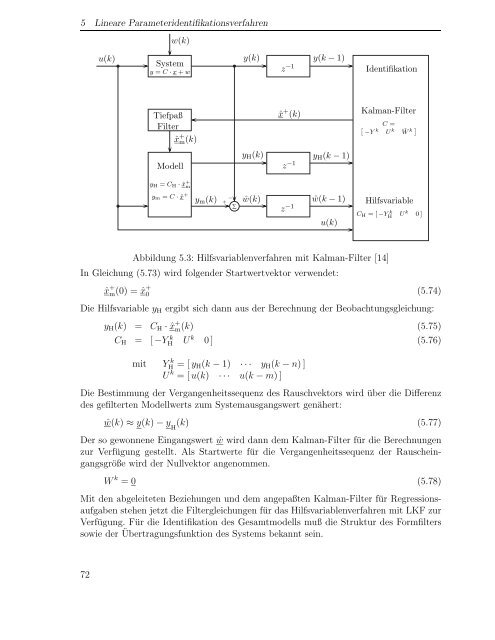
Abbildung 5.3: Hilfsvariablenverfahren mit Kalman-Filter [14]<br />
In Gleichung (5.73) wird folgender Startwertvektor verwendet:<br />
ˆx + m(0) = ˆx + 0 (5.74)<br />
Die Hilfsvariable y H ergibt sich dann aus der Berechnung der Beobachtungsgleichung:<br />
y H (k) = C H · ˆx + m(k) (5.75)<br />
C H = [−YH k U k 0 ] (5.76)<br />
mit Y k H =[y H (k − 1) ··· y H (k − n)]<br />
U k =[u(k) ··· u(k − m)]<br />
Die Bestimmung der Vergangenheitssequenz des Rauschvektors wird über die Differenz<br />
des gefilterten Modellwerts zum Systemausgangswert genähert:<br />
ŵ(k) ≈ y(k) − y H<br />
(k) (5.77)<br />
Der so gewonnene Eingangswert ŵ wird dann dem Kalman-Filter für die Berechnungen<br />
zur Verfügung gestellt. Als Startwerte für die Vergangenheitssequenz der Rauscheingangsgröße<br />
wird der Nullvektor angenommen.<br />
W k =0 (5.78)<br />
Mit den abgeleiteten Beziehungen und dem angepaßten Kalman-Filter für Regressionsaufgaben<br />
stehen jetzt die Filtergleichungen für das Hilfsvariablenverfahren mit LKF zur<br />
Verfügung. Für die Identifikation des Gesamtmodells muß die Struktur des Formfilters<br />
sowie der Übertragungsfunktion des Systems bekannt sein.<br />
72













