

Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
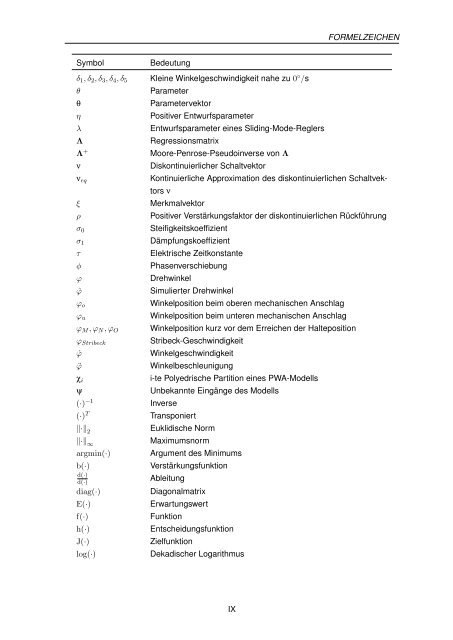
Symbol Bedeutung<br />
δ1, δ2, δ3, δ4, δ5 Kleine Winkelgeschwindigkeit nahe zu 0◦ /s<br />
θ Parameter<br />
θ Parametervektor<br />
η Positiver Entwurfsparameter<br />
λ Entwurfsparameter eines Sliding-Mode-Reglers<br />
Λ Regressionsmatrix<br />
Λ + Moore-Penrose-Pseudoinverse von Λ<br />
ν Diskontinuierlicher Schaltvektor<br />
νeq<br />
FORMELZEICHEN<br />
Kontinuierliche Approximation des diskontinuierlichen Schaltvek-<br />
tors ν<br />
ξ Merkmalvektor<br />
ρ Positiver Verstärkungsfaktor der diskontinuierlichen Rückführung<br />
σ0<br />
σ1<br />
Steifigkeitskoeffizient<br />
Dämpfungskoeffizient<br />
τ Elektrische Zeitkonstante<br />
φ Phasenverschiebung<br />
ϕ Drehwinkel<br />
ˆϕ Simulierter Drehwinkel<br />
ϕo<br />
ϕu<br />
ϕM, ϕN, ϕO<br />
ϕStribeck<br />
Winkelposition <strong>bei</strong>m oberen mechanischen Anschlag<br />
Winkelposition <strong>bei</strong>m unteren mechanischen Anschlag<br />
Winkelposition kurz vor dem Erreichen der Halteposition<br />
Stribeck-Geschwindigkeit<br />
˙ϕ Winkelgeschwindigkeit<br />
¨ϕ Winkelbeschleunigung<br />
χi<br />
i-te Polyedrische Partition eines PWA-Modells<br />
ψ Unbekannte Eingänge des Modells<br />
(·) −1 Inverse<br />
(·) T Transponiert<br />
· 2<br />
Euklidische Norm<br />
·∞ Maximumsnorm<br />
argmin(·) Argument des Minimums<br />
b(·) Verstärkungsfunktion<br />
d(·)<br />
d(·)<br />
Ableitung<br />
diag(·) Diagonalmatrix<br />
E(·) Erwartungswert<br />
f(·) Funktion<br />
h(·) Entscheidungsfunktion<br />
J(·) Zielfunktion<br />
log(·) Dekadischer Logarithmus<br />
IX














