

Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Öffnen<br />
3 SEMI-PHYSIKALISCHE MODELLIERUNG<br />
Schließen<br />
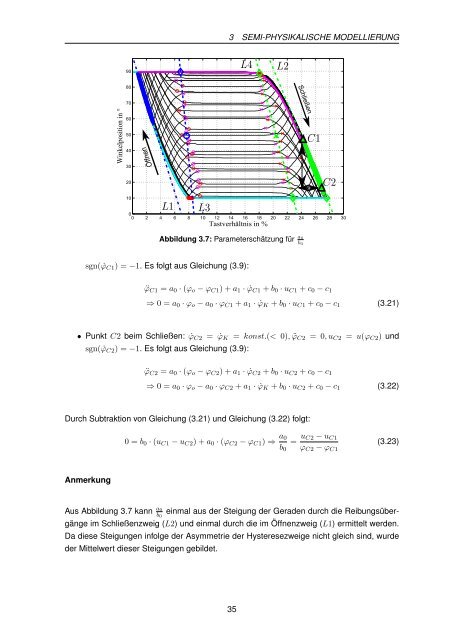
Abbildung 3.7: Parameterschätzung für a0<br />
b0<br />
sgn( ˙ϕC1) = −1. Es folgt aus Gleichung (3.9):<br />
¨ϕC1 = a0 · (ϕo − ϕC1) + a1 · ˙ϕC1 + b0 · uC1 + c0 − c1<br />
⇒ 0 = a0 · ϕo − a0 · ϕC1 + a1 · ˙ϕK + b0 · uC1 + c0 − c1<br />
(3.21)<br />
• Punkt C2 <strong>bei</strong>m Schließen: ˙ϕC2 = ˙ϕK = konst.(< 0), ¨ϕC2 = 0, uC2 = u(ϕC2) und<br />
sgn( ˙ϕC2) = −1. Es folgt aus Gleichung (3.9):<br />
¨ϕC2 = a0 · (ϕo − ϕC2) + a1 · ˙ϕC2 + b0 · uC2 + c0 − c1<br />
⇒ 0 = a0 · ϕo − a0 · ϕC2 + a1 · ˙ϕK + b0 · uC2 + c0 − c1<br />
Durch Subtraktion von Gleichung (3.21) und Gleichung (3.22) folgt:<br />
Anmerkung<br />
Aus Abbildung 3.7 kann a0<br />
b0<br />
0 = b0 · (uC1 − uC2) + a0 · (ϕC2 − ϕC1) ⇒ a0<br />
b0<br />
= uC2 − uC1<br />
ϕC2 − ϕC1<br />
(3.22)<br />
(3.23)<br />
einmal aus der Steigung der Geraden durch die <strong>Reibung</strong>süber-<br />
gänge im Schließenzweig (L2) und einmal durch die im Öffnenzweig (L1) er<strong>mit</strong>telt werden.<br />
Da diese Steigungen infolge der Asymmetrie der Hysteresezweige nicht gleich sind, wurde<br />
der Mittelwert dieser Steigungen gebildet.<br />
35














