

Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...
Zur Identifikation mechatronischer Stellglieder mit Reibung bei ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4 MODELLIERUNG MIT DEM SLIDING-MODE-BEOBACHTER<br />
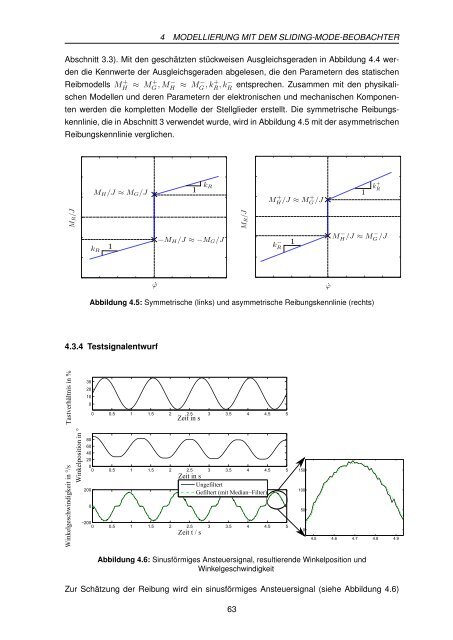
Abschnitt 3.3). Mit den geschätzten stückweisen Ausgleichsgeraden in Abbildung 4.4 wer-<br />
den die Kennwerte der Ausgleichsgeraden abgelesen, die den Parametern des statischen<br />
Reibmodells M +<br />
H<br />
+ −<br />
≈ M G , MH −<br />
≈ MG , k+<br />
R , k−<br />
R<br />
entsprechen. Zusammen <strong>mit</strong> den physikali-<br />
schen Modellen und deren Parametern der elektronischen und mechanischen Komponen-<br />
ten werden die kompletten Modelle der <strong>Stellglieder</strong> erstellt. Die symmetrische <strong>Reibung</strong>s-<br />
kennlinie, die in Abschnitt 3 verwendet wurde, wird in Abbildung 4.5 <strong>mit</strong> der asymmetrischen<br />
<strong>Reibung</strong>skennlinie verglichen.<br />
Abbildung 4.5: Symmetrische (links) und asymmetrische <strong>Reibung</strong>skennlinie (rechts)<br />
4.3.4 Testsignalentwurf<br />
Abbildung 4.6: Sinusförmiges Ansteuersignal, resultierende Winkelposition und<br />
Winkelgeschwindigkeit<br />
<strong>Zur</strong> Schätzung der <strong>Reibung</strong> wird ein sinusförmiges Ansteuersignal (siehe Abbildung 4.6)<br />
63














