

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Biomechanics</strong><strong>and</strong>medic<strong>in</strong>e<strong>in</strong>swimm<strong>in</strong>gXi<br />
Comparison of Front Crawl Swimm<strong>in</strong>g Drag between<br />
Elite <strong>and</strong> Non-Elite Swimmers Us<strong>in</strong>g Pressure<br />
Measurement <strong>and</strong> Motion Analysis<br />
Ichikawa, h. 1 , Miwa, t. 1 , takeda, t. 2 , takagi, h. 2 , tsubakimoto,<br />
s. 2<br />
1 Japan Institute of Sports Sciences, Tokyo, Japan<br />
2 University of Tsukuba, Ibaraki, Japan<br />
The purpose of the study was to suggest a methodology to quantify the<br />
drag force dur<strong>in</strong>g front crawl swimm<strong>in</strong>g <strong>and</strong> to compare the drag force<br />
between elite <strong>and</strong> non-elite swimmers. Subjects were asked to swim<br />
front crawl us<strong>in</strong>g arms only <strong>in</strong> swimm<strong>in</strong>g flume, which set the velocity<br />
to 1.3 m/s. The pressure distribution on the swimmer’s h<strong>and</strong>s <strong>and</strong><br />
the orientation of the swimmer’s h<strong>and</strong>s were measured to calculate the<br />
propulsive force. The position of the umbilicus was recorded us<strong>in</strong>g high<br />
speed camera with 250 fps to calculate the swimm<strong>in</strong>g acceleration. The<br />
drag force was estimated accord<strong>in</strong>g to the equation of motion “ma = Fp +<br />
Fd” along with swimm<strong>in</strong>g direction. The elite swimmer swam efficiently<br />
with lower drag force (averag<strong>in</strong>g at 21N) compared to the non-elite<br />
swimmer (average 50N). Our methodology would be useful to compare<br />
the dynamics <strong>and</strong> to discuss the performance of swimm<strong>in</strong>g.<br />
Key words: drag force, propulsive force, <strong>in</strong>ertial term, dynamics, front<br />
crawl swimm<strong>in</strong>g<br />
IntroductIon<br />
The dynamics of swimm<strong>in</strong>g is expressed as a mass model,<br />
ma + F<br />
100<br />
= Fgra<br />
+ Fsta<br />
dyn<br />
(1)<br />
where m <strong>and</strong> a are a swimmer’s mass <strong>and</strong> acceleration vector of the<br />
swimmer’s whole body. F gra is downward force vector due to gravity, F sta<br />
is upward hydrostatic force vector that is called buoyancy, <strong>and</strong> F dyn is<br />
unsteady hydrodynamic force that Namashima (2006) was modell<strong>in</strong>g as<br />
tangential <strong>and</strong> normal resistive fluid force, which are proportional to the<br />
local flow velocity, <strong>and</strong> <strong>in</strong>ertial force due to added mass, which is proportional<br />
to the local flow acceleration. The component on the swimm<strong>in</strong>g<br />
direction of Equation 1 was expressed as,<br />
ma +<br />
= Fdyn−<br />
swim = Fp<br />
Fd<br />
(2)<br />
where a <strong>and</strong> F dyn-swim are the component along with swimm<strong>in</strong>g direction<br />
of a <strong>and</strong> F dyn , respectively. The F dyn-swim is separated <strong>in</strong>to forward force<br />
F p , which is propulsive force, <strong>and</strong> backward force F d , which is drag force.<br />
Many researchers have suggested some methodologies to quantify the<br />
drag force <strong>in</strong> swimm<strong>in</strong>g as “active drag”, although it is difficult to quantify<br />
the drag force <strong>in</strong> swimm<strong>in</strong>g (Di Prampero et al. 1974, Clarys et al.<br />
1974, Holl<strong>and</strong>er et al. 1986, Kolmogorov et al.1992). The methodologies<br />
have some assumptions, such as “swimm<strong>in</strong>g velocity is constant” (Di<br />
Prampero et al. 1974, Holl<strong>and</strong>er et al. 1986), “propulsive <strong>and</strong> drag force<br />
are <strong>in</strong> balance” (Clarys et al. 1974, Kolmogorov et al. 1992). Almost all<br />
previous researches expressed the drag force as a s<strong>in</strong>gle value, which was<br />
a mean value dur<strong>in</strong>g some strokes. The drag force is, however, chang<strong>in</strong>g<br />
from moment to moment dur<strong>in</strong>g swimm<strong>in</strong>g, so the assumptions <strong>and</strong><br />
the expression of drag force would make us overlook some <strong>in</strong>formation<br />
of swimm<strong>in</strong>g dynamics. It is important to observe the dynamics<br />
of the propulsive <strong>and</strong> drag forces dur<strong>in</strong>g swimm<strong>in</strong>g quantitatively <strong>and</strong><br />
cont<strong>in</strong>uously, because it would lead to better discussion of the swimm<strong>in</strong>g<br />
technique <strong>and</strong> performance.<br />
In the present study, the drag force, which is chang<strong>in</strong>g dur<strong>in</strong>g front<br />
crawl swimm<strong>in</strong>g, was quantified with a methodology that is accord<strong>in</strong>g<br />
to the equation of motion (Eq.2) to discuss the dynamics of front crawl<br />
dur<strong>in</strong>g swimm<strong>in</strong>g quantitatively <strong>and</strong> cont<strong>in</strong>uously, because it wo<br />
discussion of the swimm<strong>in</strong>g technique <strong>and</strong> performance.<br />
In the present study, the drag force, which is chang<strong>in</strong>g d<br />
swimm<strong>in</strong>g, was quantified with a methodology that is accord<strong>in</strong>g<br />
motion (Eq.2) to discuss the dynamics of front crawl swimm<strong>in</strong>g. T<br />
study were to suggest a methodology to quantify the drag force d<br />
swimm<strong>in</strong>g. The purposes of the study were to suggest a methodology to<br />
swimm<strong>in</strong>g, <strong>and</strong> to compare the drag force between an elite (a com<br />
quantify the drag force dur<strong>in</strong>g front crawl swimm<strong>in</strong>g, <strong>and</strong> to compare<br />
<strong>and</strong> a non-elite (a triathlete) swimmer.<br />
the drag force between an elite (a competitive swimmer) <strong>and</strong> a non-elite<br />
(a triathlete) swimmer.<br />
METHODS<br />
METHODS The subjects were a well-tra<strong>in</strong>ed male competitive swimmer <strong>and</strong> a m<br />
The profile subjects of were the a well-tra<strong>in</strong>ed subjects is male shown competitive <strong>in</strong> Table swimmer 1. The <strong>and</strong> subjects a male were asked<br />
triathlete. crawl The us<strong>in</strong>g profile arms of the only subjects <strong>in</strong> a swimm<strong>in</strong>g is shown <strong>in</strong> Table flume, 1. The which subjects was set the flow<br />
were m/s. asked In to the swim experiment, the front crawl the pressure us<strong>in</strong>g arms distribution only <strong>in</strong> a swimm<strong>in</strong>g on swimmer's h<strong>and</strong>s<br />
flume, the which h<strong>and</strong>s was <strong>and</strong> set the position flow<strong>in</strong>g velocity of the at umbilicus 1.3 m/s. In the were experiment, measured dur<strong>in</strong>g the<br />
the pressure distribution on swimmer’s h<strong>and</strong>s, the orientation of the<br />
h<strong>and</strong>s Table <strong>and</strong> 1. the Characteristics position of the umbilicus of the were subjects. measured dur<strong>in</strong>g the trial.<br />
Bes<br />
Table Subject 1. Characteristics of the Height subjects. [m] Weight [kg] Age [yrs]<br />
100<br />
Best record for<br />
Subject Competitive Height [m] Weight [kg] Age [yrs]<br />
1.79 74.0 100m-Fr. 22.4 [sec] 49.6<br />
swimmer<br />
Competitive swimmer 1.79 74.0 22.4 49.6<br />
Triathlete 1.70 1.70 68.0 68.0 22.7 82.022.7<br />
82.0<br />
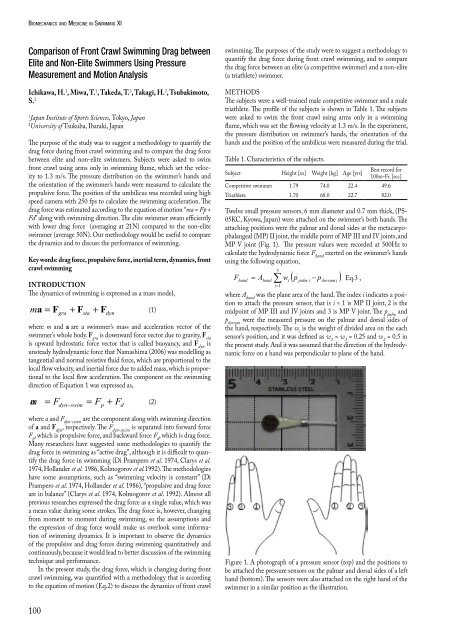
Twelve small pressure sensors, 6 mm diameter <strong>and</strong> 0.7 mm thick, (PS-<br />
05KC, Kyowa, Twelve Japan) small were pressure attached on sensors, the swimmer’s 6 mm both diameter h<strong>and</strong>s. The <strong>and</strong> 0.7 mm<br />
attach<strong>in</strong>g Kyowa, positions Japan) were were the palmar attached <strong>and</strong> dorsal on the sides swimmer's at the metacarpo- both h<strong>and</strong>s. The a<br />
phalangeal were the (MP) palmar II jo<strong>in</strong>t, <strong>and</strong> the middle dorsal po<strong>in</strong>t sides of at MP the III metacarpophalangeal <strong>and</strong> IV jo<strong>in</strong>ts, <strong>and</strong> (MP) I<br />
MP po<strong>in</strong>t V jo<strong>in</strong>t of (Fig. MP 1). III The <strong>and</strong> pressure IV jo<strong>in</strong>ts, values were <strong>and</strong> recorded MP V at jo<strong>in</strong>t 500Hz (Fig. to 1). The pre<br />
calculate recorded the hydrodynamic at 500Hz to force calculate Fh<strong>and</strong> exerted the hydrodynamic on the swimmer’s h<strong>and</strong>s force Fh<strong>and</strong> exerted<br />
us<strong>in</strong>g h<strong>and</strong>s the follow<strong>in</strong>g us<strong>in</strong>g the equation, follow<strong>in</strong>g equation,<br />
3<br />
h<strong>and</strong> ∑<br />
i=<br />
1<br />
( p − p )<br />
F = A w<br />
Eq.3 , ,<br />
h<strong>and</strong><br />
i<br />
palm i<br />
dorsum i<br />
where where A Ah<strong>and</strong> was the plane area of the h<strong>and</strong>. The <strong>in</strong>dex i <strong>in</strong>dicates a po<br />
h<strong>and</strong> was the plane area of the h<strong>and</strong>. The <strong>in</strong>dex i <strong>in</strong>dicates a position<br />
pressure to attach sensor, the pressure that sensor, is i = that 1 is is MP i = 1 II is jo<strong>in</strong>t, MP II 2 jo<strong>in</strong>t, is the 2 is midpo<strong>in</strong>t the of MP II<br />
midpo<strong>in</strong>t 3 is MP of MP V jo<strong>in</strong>t. III <strong>and</strong> The IV jo<strong>in</strong>ts ppalm <strong>and</strong> <strong>and</strong> 3 is pdorsum MP V jo<strong>in</strong>t. were The the ppalm measured <strong>and</strong> pressure<br />
pdorsum dorsal were sides the measured of the h<strong>and</strong>, pressure respectively. on the palmar The <strong>and</strong> dorsal wi is the sides weight of of divide<br />
the sensor’s h<strong>and</strong>, respectively. position, The <strong>and</strong> wi is it the was weight def<strong>in</strong>ed of divided as w1<br />
area = w3<br />
on = the 0.25 each <strong>and</strong> w2 = 0.5 <strong>in</strong><br />
sensor’s And position, it was <strong>and</strong> assumed it was def<strong>in</strong>ed that as the w1 direction = w3 = 0.25 of <strong>and</strong> the w2 = hydrodynamic 0.5 <strong>in</strong> forc<br />
the<br />
perpendicular<br />
present study. And<br />
to<br />
it<br />
plane<br />
was assumed<br />
of the<br />
that<br />
h<strong>and</strong>.<br />
the direction of the hydrodynamic<br />
force on a h<strong>and</strong> was perpendicular to plane of the h<strong>and</strong>.<br />
Figure 1. A photograph of a pressure sensor (top) <strong>and</strong> the positions to<br />
be attached the pressure sensors on the palmar <strong>and</strong> dorsal sides of a left<br />
h<strong>and</strong> (bottom). The sensors were also attached on the right h<strong>and</strong> of the<br />
swimmer <strong>in</strong> a similar position as the illustration.














