

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Biomechanics</strong><strong>and</strong>medic<strong>in</strong>e<strong>in</strong>swimm<strong>in</strong>gXi<br />
Identify<strong>in</strong>g Determ<strong>in</strong>ant Movement Sequences <strong>in</strong><br />
Monof<strong>in</strong> Swimm<strong>in</strong>g Technique<br />
rejman, M. & staszkiewicz, A.<br />
University School of Physical Education, Wroclaw, Pol<strong>and</strong><br />
The aim of this study is to identify errors <strong>in</strong> leg <strong>and</strong> monof<strong>in</strong> movement<br />
structure, which lower the effectiveness of swimm<strong>in</strong>g. The movement<br />
cycles of six swimmers were filmed underwater <strong>in</strong> a progressive trial<br />
(900 m at <strong>in</strong>creas<strong>in</strong>g speeds). Results due to k<strong>in</strong>ematical analysis were<br />
obta<strong>in</strong>ed as temporal data for: angle of foot bend<strong>in</strong>g <strong>in</strong> relation to the<br />
shank, proximal end of the monof<strong>in</strong> <strong>in</strong> relation to the foot <strong>and</strong> for angle<br />
of attack of the distal part <strong>and</strong> entire f<strong>in</strong> surface. The parameters were<br />
selected accord<strong>in</strong>g to an exist<strong>in</strong>g functional model of monof<strong>in</strong> swimm<strong>in</strong>g.<br />
Hence, the identification of determ<strong>in</strong>ant movement sequences<br />
<strong>and</strong> technical key elements <strong>in</strong> monof<strong>in</strong> swimm<strong>in</strong>g <strong>and</strong> their quantification,<br />
make sense <strong>in</strong> order to anticipate <strong>and</strong> elim<strong>in</strong>ate errors.<br />
Key words: swimm<strong>in</strong>g, monof<strong>in</strong>, determ<strong>in</strong>ant movement sequence,<br />
technique errors<br />
IntroductIon<br />
The surface area of a monof<strong>in</strong> is about 20 times larger than human feet,<br />
<strong>and</strong> it is a more relevant source of propulsion. Monof<strong>in</strong> swimm<strong>in</strong>g for<br />
learn<strong>in</strong>g, leisure or water rescue requires basic technical ability. At elite<br />
sport<strong>in</strong>g level, a perfect technique is required, as the monof<strong>in</strong> does not<br />
“forgive errors”. An error may objectively be def<strong>in</strong>ed as a performance of<br />
movement not <strong>in</strong> accordance with a given pattern. From motor po<strong>in</strong>t of<br />
view, it may be a movement not <strong>in</strong> accordance with the orig<strong>in</strong>al <strong>in</strong>tention<br />
(Brehmer <strong>and</strong> Sperle, 1984). A determ<strong>in</strong>ant movement sequence is<br />
literally the general execution of movement activity which is determ<strong>in</strong>ed<br />
to be “correct” by objective parameters. The ability to verbally name a<br />
movement precisely allows the comb<strong>in</strong><strong>in</strong>g of cognizant execution of action,<br />
with the perception of what this action should be, support<strong>in</strong>g the<br />
<strong>in</strong>tellectual process of teach<strong>in</strong>g <strong>and</strong> perfect<strong>in</strong>g technique (Richard et al.,<br />
2005).<br />
Explicit conditions generat<strong>in</strong>g monof<strong>in</strong> propulsion form the basis of<br />
several biomechanical analyses of technique, which develop a description<br />
of the exist<strong>in</strong>g processes generat<strong>in</strong>g propulsion (e.g. Colman et al.,<br />
(1999), formulate quality criteria for swimm<strong>in</strong>g technique (e.g. Shup<strong>in</strong>g<br />
et al., 2002; Rejman, 2006) <strong>and</strong> create a search through model<strong>in</strong>g<br />
(e.g. Wu 1971). The rema<strong>in</strong><strong>in</strong>g analysis is set aside for the aspects of<br />
biomechanical application - useful <strong>in</strong> tra<strong>in</strong><strong>in</strong>g procedures (e.g. Rejman<br />
<strong>and</strong> Ochmann, 2009; Persyn <strong>and</strong> Colman, 1997). Therefore, the aim of<br />
this study was to identify errors <strong>in</strong> leg <strong>and</strong> monof<strong>in</strong> movement structure,<br />
which lower the effectiveness of swimm<strong>in</strong>g. The research assignments<br />
formulated with<strong>in</strong> the context of the use a monof<strong>in</strong> for maximum swimm<strong>in</strong>g<br />
speed are: (1) the identification of errors <strong>in</strong> the leg <strong>and</strong> monof<strong>in</strong><br />
movement <strong>in</strong> order to describe their structure <strong>and</strong> scale; (2) the identification<br />
of determ<strong>in</strong>ant movement sequences <strong>and</strong> key technical elements<br />
of leg <strong>and</strong> monof<strong>in</strong> movement <strong>in</strong> terms of potential errors, with an aim<br />
towards their anticipation <strong>and</strong> elim<strong>in</strong>ation; (3) the identification of the<br />
relation between monof<strong>in</strong> swimm<strong>in</strong>g speed <strong>and</strong> the structure <strong>and</strong> scale<br />
of errors, with an aim towards the isolation of determ<strong>in</strong>ant movement<br />
sequences with<strong>in</strong> the measure of quality of monof<strong>in</strong> swimm<strong>in</strong>g technique.<br />
Methods<br />
Six representatives of the Polish Monof<strong>in</strong> Swimm<strong>in</strong>g Team (homogenous<br />
<strong>in</strong> terms of age, somatic parameters <strong>and</strong> championship level of<br />
technique) took part <strong>in</strong> the research. They conducted a progressive test<br />
(swimm<strong>in</strong>g 900 m at <strong>in</strong>creas<strong>in</strong>g speeds). To register parameters describ<strong>in</strong>g<br />
the leg <strong>and</strong> f<strong>in</strong> movements, the swimmers were filmed underwater.<br />
160<br />
Identification marks were place on the axes of the hip, knee <strong>and</strong> ankle<br />
jo<strong>in</strong>ts. The monof<strong>in</strong> was also marked (at the tail - where the plate is<br />
jo<strong>in</strong>ed to the feet, at the middle <strong>and</strong> at the edge of the f<strong>in</strong>). The marks<br />
served to divided the f<strong>in</strong> <strong>in</strong>to proximal (between tail <strong>and</strong> middle) <strong>and</strong><br />
distal (between middle <strong>and</strong> edge) parts, as well as to monitor the entire<br />
surface of the f<strong>in</strong>. A r<strong>and</strong>om cycle (each 100m) from each swimmer<br />
was chosen. SIMI System (SIMI Reality Motion Systems GmbH, Germany)<br />
was used for k<strong>in</strong>ematic analysis. The results were obta<strong>in</strong>ed <strong>in</strong> the<br />
form of temporal data for the angles of bend at the foot <strong>in</strong> relation to<br />
the shank (KAT), the proximal part <strong>in</strong> relation to the foot (ATM), the<br />
angle of attack of the distal part (HME) <strong>and</strong> the entire surface of the<br />
f<strong>in</strong> (HME). The exist<strong>in</strong>g model exactly these parameters were found to<br />
create maximum swimm<strong>in</strong>g speed when they are optimized (Rejman<br />
& Ochmann, 2009). Friedman’s test <strong>and</strong> Kendall’s coefficient, useful <strong>in</strong><br />
analysis of small groups were applied to confirm the existence of the<br />
similarities <strong>in</strong> the data studied.<br />
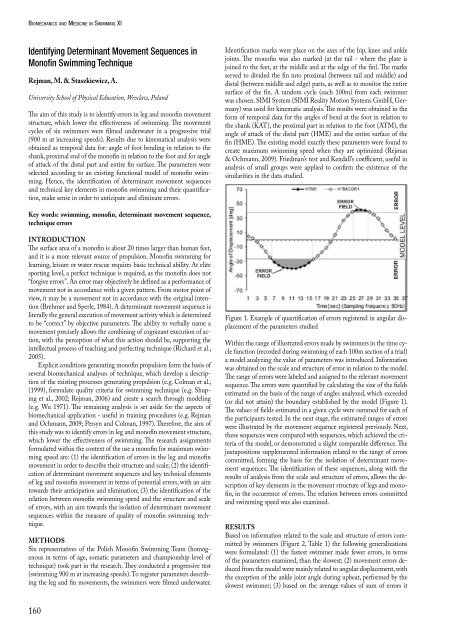
Figure 1. Example of quantification of errors registered <strong>in</strong> angular displacement<br />
of the parameters studied<br />
With<strong>in</strong> the range of illustrated errors made by swimmers <strong>in</strong> the time cycle<br />
function (recorded dur<strong>in</strong>g swimm<strong>in</strong>g of each 100m section of a trial)<br />
a model analyz<strong>in</strong>g the value of parameters was <strong>in</strong>troduced. Information<br />
was obta<strong>in</strong>ed on the scale <strong>and</strong> structure of error <strong>in</strong> relation to the model.<br />
The range of errors were labeled <strong>and</strong> assigned to the relevant movement<br />
sequence. The errors were quantified by calculat<strong>in</strong>g the size of the fields<br />
estimated on the basis of the range of angles analyzed, which exceeded<br />
(or did not atta<strong>in</strong>) the boundary established by the model (Figure 1).<br />
The values of fields estimated <strong>in</strong> a given cycle were summed for each of<br />
the participants tested. In the next stage, the estimated ranges of errors<br />
were illustrated by the movement sequence registered previously. Next,<br />
these sequences were compared with sequences, which achieved the criteria<br />
of the model, or demonstrated a slight comparable difference. The<br />
juxtapositions supplemented <strong>in</strong>formation related to the range of errors<br />
committed, form<strong>in</strong>g the basis for the isolation of determ<strong>in</strong>ant movement<br />
sequences. The identification of these sequences, along with the<br />
results of analysis from the scale <strong>and</strong> structure of errors, allows the description<br />
of key elements <strong>in</strong> the movement structure of legs <strong>and</strong> monof<strong>in</strong>,<br />
<strong>in</strong> the occurrence of errors. The relation between errors committed<br />
<strong>and</strong> swimm<strong>in</strong>g speed was also exam<strong>in</strong>ed.<br />
results<br />
Based on <strong>in</strong>formation related to the scale <strong>and</strong> structure of errors committed<br />
by swimmers (Figure 2, Table 1) the follow<strong>in</strong>g generalizations<br />
were formulated: (1) the fastest swimmer made fewer errors, <strong>in</strong> terms<br />
of the parameters exam<strong>in</strong>ed, than the slowest; (2) movement errors deduced<br />
from the model were ma<strong>in</strong>ly related to angular displacement, with<br />
the exception of the ankle jo<strong>in</strong>t angle dur<strong>in</strong>g upbeat, performed by the<br />
slowest swimmer; (3) based on the average values of sum of errors it














