

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Biomechanics</strong><strong>and</strong>medic<strong>in</strong>e<strong>in</strong>swimm<strong>in</strong>gXi<br />
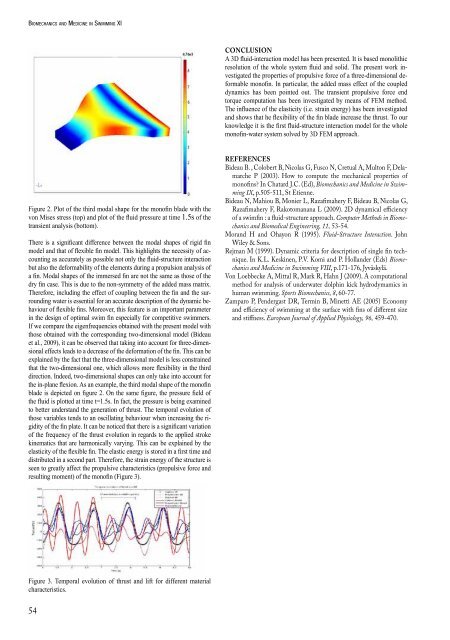
Figure 2. Plot of the third modal shape for the monof<strong>in</strong> blade with the<br />
von Mises stress (top) <strong>and</strong> plot of the fluid pressure at time 1.5s of the<br />
transient analysis (bottom).<br />
There is a significant difference between the modal shapes of rigid f<strong>in</strong><br />
model <strong>and</strong> that of flexible f<strong>in</strong> model. This highlights the necessity of account<strong>in</strong>g<br />
as accurately as possible not only the fluid-structure <strong>in</strong>teraction<br />
but also the deformability of the elements dur<strong>in</strong>g a propulsion analysis of<br />
a f<strong>in</strong>. Modal shapes of the immersed f<strong>in</strong> are not the same as those of the<br />
dry f<strong>in</strong> case. This is due to the non-symmetry of the added mass matrix.<br />
Therefore, <strong>in</strong>clud<strong>in</strong>g the effect of coupl<strong>in</strong>g between the f<strong>in</strong> <strong>and</strong> the surround<strong>in</strong>g<br />
water is essential for an accurate description of the dynamic behaviour<br />
of flexible f<strong>in</strong>s. Moreover, this feature is an important parameter<br />
<strong>in</strong> the design of optimal swim f<strong>in</strong> especially for competitive swimmers.<br />
If we compare the eigenfrequencies obta<strong>in</strong>ed with the present model with<br />
those obta<strong>in</strong>ed with the correspond<strong>in</strong>g two-dimensional model (Bideau<br />
et al., 2009), it can be observed that tak<strong>in</strong>g <strong>in</strong>to account for three-dimensional<br />
effects leads to a decrease of the deformation of the f<strong>in</strong>. This can be<br />
expla<strong>in</strong>ed by the fact that the three-dimensional model is less constra<strong>in</strong>ed<br />
that the two-dimensional one, which allows more flexibility <strong>in</strong> the third<br />
direction. Indeed, two-dimensional shapes can only take <strong>in</strong>to account for<br />
the <strong>in</strong>-plane flexion. As an example, the third modal shape of the monof<strong>in</strong><br />
blade is depicted on figure 2. On the same figure, the pressure field of<br />
the fluid is plotted at time t=1.5s. In fact, the pressure is be<strong>in</strong>g exam<strong>in</strong>ed<br />
to better underst<strong>and</strong> the generation of thrust. The temporal evolution of<br />
those variables tends to an oscillat<strong>in</strong>g behaviour when <strong>in</strong>creas<strong>in</strong>g the rigidity<br />
of the f<strong>in</strong> plate. It can be noticed that there is a significant variation<br />
of the frequency of the thrust evolution <strong>in</strong> regards to the applied stroke<br />
k<strong>in</strong>ematics that are harmonically vary<strong>in</strong>g. This can be expla<strong>in</strong>ed by the<br />
elasticity of the flexible f<strong>in</strong>. The elastic energy is stored <strong>in</strong> a first time <strong>and</strong><br />
distributed <strong>in</strong> a second part. Therefore, the stra<strong>in</strong> energy of the structure is<br />
seen to greatly affect the propulsive characteristics (propulsive force <strong>and</strong><br />
result<strong>in</strong>g moment) of the monof<strong>in</strong> (Figure 3).<br />
Figure 3. Temporal evolution of thrust <strong>and</strong> lift for different material<br />
characteristics.<br />
54<br />
conclusIon<br />
A 3D fluid-<strong>in</strong>teraction model has been presented. It is based monolithic<br />
resolution of the whole system fluid <strong>and</strong> solid. The present work <strong>in</strong>vestigated<br />
the properties of propulsive force of a three-dimensional deformable<br />
monof<strong>in</strong>. In particular, the added mass effect of the coupled<br />
dynamics has been po<strong>in</strong>ted out. The transient propulsive force end<br />
torque computation has been <strong>in</strong>vestigated by means of FEM method.<br />
The <strong>in</strong>fluence of the elasticity (i.e. stra<strong>in</strong> energy) has been <strong>in</strong>vestigated<br />
<strong>and</strong> shows that he flexibility of the f<strong>in</strong> blade <strong>in</strong>crease the thrust. To our<br />
knowledge it is the first fluid-structure <strong>in</strong>teraction model for the whole<br />
monof<strong>in</strong>-water system solved by 3D FEM approach.<br />
reFerences<br />
Bideau B. , Colobert B, Nicolas G, Fusco N, Cretual A, Multon F, Delamarche<br />
P (2003). How to compute the mechanical properties of<br />
monof<strong>in</strong>s? In Chatard J.C. (Ed), <strong>Biomechanics</strong> <strong>and</strong> <strong>Medic<strong>in</strong>e</strong> <strong>in</strong> Swimm<strong>in</strong>g<br />
IX, p.505-511, St Etienne.<br />
Bideau N, Mahiou B, Monier L, Razafimahery F, Bideau B, Nicolas G,<br />
Razafimahery F, Rakotomanana L (2009). 2D dynamical efficiency<br />
of a swimf<strong>in</strong> : a fluid-structure approach. Computer Methods <strong>in</strong> <strong>Biomechanics</strong><br />
<strong>and</strong> Biomedical Eng<strong>in</strong>eer<strong>in</strong>g, 11, 53-54.<br />
Mor<strong>and</strong> H <strong>and</strong> Ohayon R (1995). Fluid-Structure Interaction. John<br />
Wiley & Sons.<br />
Rejman M (1999). Dynamic criteria for description of s<strong>in</strong>gle f<strong>in</strong> technique.<br />
In K.L. Kesk<strong>in</strong>en, P.V. Komi <strong>and</strong> P. Holl<strong>and</strong>er (Eds) <strong>Biomechanics</strong><br />
<strong>and</strong> <strong>Medic<strong>in</strong>e</strong> <strong>in</strong> Swimm<strong>in</strong>g VIII, p.171-176, Jyväskylä.<br />
Von Loebbecke A, Mittal R, Mark R, Hahn J (2009). A computational<br />
method for analysis of underwater dolph<strong>in</strong> kick hydrodymamics <strong>in</strong><br />
human swimm<strong>in</strong>g. Sports <strong>Biomechanics</strong>, 8, 60-77.<br />
Zamparo P, Pendergast DR, Term<strong>in</strong> B, M<strong>in</strong>etti AE (2005) Economy<br />
<strong>and</strong> efficiency of swimm<strong>in</strong>g at the surface with f<strong>in</strong>s of different size<br />
<strong>and</strong> stiffness. European Journal of Applied Physiology, 96, 459-470.














