

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
cm, 73.1 ± 6.4 kg <strong>and</strong> 20 ± 1.2 years, respectively. Before the experiment<br />
began, each swimmer received <strong>in</strong>struction on the no-step start <strong>and</strong> two<br />
types of step starts over a two-weeks; this was achieved by conduct<strong>in</strong>g<br />
daily tra<strong>in</strong><strong>in</strong>g sessions. In each trial of a relay start, swimmers were permitted<br />
to sw<strong>in</strong>g their arms <strong>and</strong> to perform counter-movement.<br />
In the trial, we select three relay starts: a no-step start (NS), s<strong>in</strong>glestep<br />
start (SS) <strong>and</strong> double-step start (DS) (Figure 1). For each start<br />
technique, each swimmer performed six trials with maximum effort; the<br />
trials were performed <strong>in</strong> r<strong>and</strong>om order. Each swimmer executed the relay<br />
start trial by tim<strong>in</strong>g it with the goal touch of the previous front crawl<br />
swimmer <strong>and</strong> then spr<strong>in</strong>ted 15 m by front crawl swimm<strong>in</strong>g.<br />
No-step start<br />
S<strong>in</strong>gle-step start start<br />
Double-step start start<br />
Figure 1. Three types of relay starts performed <strong>in</strong> this study.<br />
Two high-speed cameras (FAST-CAM PCI, Photron Inc., JAPAN)<br />
filmed the trials at 250 frames per second. Camera 1 was positioned<br />
such that its optical axes were perpendicular to the plane of motion.<br />
Camera 2 was positioned 2.5 m above the floor of the side pool deck <strong>and</strong><br />
filmed the scene at the <strong>in</strong>stant at which the <strong>in</strong>com<strong>in</strong>g swimmer touched<br />
his f<strong>in</strong>ish<strong>in</strong>g po<strong>in</strong>t <strong>and</strong> the outgo<strong>in</strong>g swimmer take-off from the start<strong>in</strong>g<br />
block. The relay time was def<strong>in</strong>ed as the time elapsed between the touch<br />
<strong>and</strong> take-off <strong>and</strong> was calculated by count<strong>in</strong>g the frames <strong>in</strong> the video image<br />
captured by Camera 2.<br />
Ground reaction forces dur<strong>in</strong>g the relay starts were sampled at 1000<br />
Hz by a waterproof force plate (5253B11, Kistler JAPAN Inc.) that was<br />
modified <strong>in</strong>to the start<strong>in</strong>g block. The force data were smoothed us<strong>in</strong>g a<br />
low-pass Butterworth digital filter with a low pass cutoff frequency of 40<br />
Hz. The velocity at take-off (take-off velocity) was calculated from the<br />
data on the ground reaction force by perform<strong>in</strong>g time <strong>in</strong>tegration until the<br />
time of take-off. The take-off angle was def<strong>in</strong>ed as the angle between the<br />
resultant take-off-velocity vector <strong>and</strong> horizontal l<strong>in</strong>e (upward direction:<br />
positive; downward direction: negative). The horizontal ground reaction<br />
forces were used to dist<strong>in</strong>guish the forces generated by steps or the body<br />
lean<strong>in</strong>g forward <strong>and</strong> the legs driv<strong>in</strong>g out. The force generated by legs driv<strong>in</strong>g<br />
forward was def<strong>in</strong>ed as the force after the time (t 1 ) when the horizontal<br />
ground reaction force reached over 30% of body weight. The force before<br />
t 1 was obta<strong>in</strong>ed was def<strong>in</strong>ed as the force by step or body lean<strong>in</strong>g forward<br />
(Figure 2). The horizontal reaction force generated by the legs driv<strong>in</strong>g was<br />
<strong>in</strong>tegrated with respect to time, <strong>and</strong> this value was used to calculate the velocity<br />
generated by the legs driv<strong>in</strong>g. A one-way repeated measure ANOVA<br />
was performed for the start type; this was followed by Bonferroni multiple<br />
comparison <strong>in</strong> each variable. The statistical significance was set at P < 0.05.<br />
Ground reaction force [N]<br />
Vertical<br />
+<br />
chaPter2.<strong>Biomechanics</strong><br />
horizontal<br />
+<br />
1400<br />
1200<br />
1000<br />
800<br />
Horizontal component<br />
600<br />
Force by<br />
400<br />
200<br />
0<br />
30% of subject’s body weght<br />
legs driv<strong>in</strong>g<br />
-200<br />
t1 -1.4 -1.3 -1.2 -1.1 -1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1<br />
Time [sec]<br />
0<br />
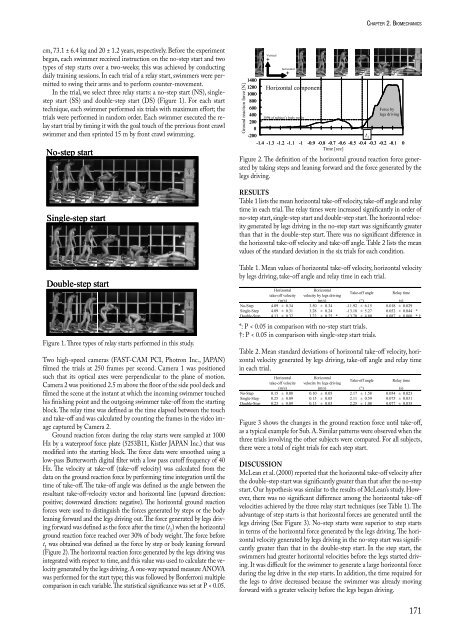
Figure 2. The def<strong>in</strong>ition of the horizontal ground reaction force generated<br />
by tak<strong>in</strong>g steps <strong>and</strong> lean<strong>in</strong>g forward <strong>and</strong> the force generated by the<br />
legs driv<strong>in</strong>g.<br />
results<br />
Table 1 lists the mean horizontal take-off velocity, take-off angle <strong>and</strong> relay<br />
time <strong>in</strong> each trial. The relay times were <strong>in</strong>creased significantly <strong>in</strong> order of<br />
no-step start, s<strong>in</strong>gle-step start <strong>and</strong> double-step start. The horizontal velocity<br />
generated by legs driv<strong>in</strong>g <strong>in</strong> the no-step start was significantly greater<br />
than that <strong>in</strong> the double-step start. There was no significant difference <strong>in</strong><br />
the horizontal take-off velocity <strong>and</strong> take-off angle. Table 2 lists the mean<br />
values of the st<strong>and</strong>ard deviation <strong>in</strong> the six trials for each condition.<br />
Table 1. Mean values of horizontal take-off velocity, horizontal velocity<br />
by legs driv<strong>in</strong>g, take-off angle <strong>and</strong> relay time <strong>in</strong> each trial.<br />
Horizontal<br />
take-off velocity<br />
Horizontal<br />
velocity by legs driv<strong>in</strong>g<br />
Take-off angle Relay time<br />
(m/s) (m/s)<br />
(°)<br />
(s)<br />
No-Step 4.09 ± 0.34 3.50 ± 0.34 -11.92 ± 6.15 0.018 ± 0.029<br />
S<strong>in</strong>gle-Step 4.09 ± 0.31 3.28 ± 0.24 -13.18 ± 5.27 0.052 ± 0.044 *<br />
Double-Step 4.13 ± 0.32 3.22 ± 0.25 * -13.70 ± 4.80 0.087 ± 0.060 * †<br />
*: P < 0.05 <strong>in</strong> comparison with no-step start trials.<br />
†: P < 0.05 <strong>in</strong> comparison with s<strong>in</strong>gle-step start trials.<br />
Table 2. Mean st<strong>and</strong>ard deviations of horizontal take-off velocity, horizontal<br />
velocity generated by legs driv<strong>in</strong>g, take-off angle <strong>and</strong> relay time<br />
<strong>in</strong> each trial.<br />
Horizontal<br />
take-off velocity<br />
Horizontal<br />
velocity by legs driv<strong>in</strong>g<br />
Take-off angle Relay time<br />
(m/s) (m/s)<br />
(°)<br />
(s)<br />
No-Step 0.15 ± 0.08 0.10 ± 0.05 2.17 ± 1.58 0.054 ± 0.023<br />
S<strong>in</strong>gle-Step 0.25 ± 0.09 0.15 ± 0.05 2.11 ± 0.59 0.075 ± 0.031<br />
Double-Step 0.23 ± 0.09 0.13 ± 0.03 2.25 ± 1.08 0.077 ± 0.035<br />
Figure 3 shows the changes <strong>in</strong> the ground reaction force until take-off,<br />
as a typical example for Sub. A. Similar patterns were observed when the<br />
three trials <strong>in</strong>volv<strong>in</strong>g the other subjects were compared. For all subjects,<br />
there were a total of eight trials for each step start.<br />
dIscussIon<br />
McLean et al. (2000) reported that the horizontal take-off velocity after<br />
the double-step start was significantly greater than that after the no-step<br />
start. Our hypothesis was similar to the results of McLean’s study. However,<br />
there was no significant difference among the horizontal take-off<br />
velocities achieved by the three relay start techniques (see Table 1). The<br />
advantage of step starts is that horizontal forces are generated until the<br />
legs driv<strong>in</strong>g (See Figure 3). No-step starts were superior to step starts<br />
<strong>in</strong> terms of the horizontal force generated by the legs driv<strong>in</strong>g. The horizontal<br />
velocity generated by legs driv<strong>in</strong>g <strong>in</strong> the no-step start was significantly<br />
greater than that <strong>in</strong> the double-step start. In the step start, the<br />
swimmers had greater horizontal velocities before the legs started driv<strong>in</strong>g.<br />
It was difficult for the swimmer to generate a large horizontal force<br />
dur<strong>in</strong>g the leg drive <strong>in</strong> the step starts. In addition, the time required for<br />
the legs to drive decreased because the swimmer was already mov<strong>in</strong>g<br />
forward with a greater velocity before the legs began driv<strong>in</strong>g.<br />
171














