

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
(<strong>in</strong>clud<strong>in</strong>g crawl stroke) have also been carried out (Nakashima 2007b).<br />
The details are described <strong>in</strong> the references respectively. Some of the analysis<br />
data <strong>and</strong> animation movies are open to the public at the SWUM website<br />
(http://www.swum.org/).<br />
The first extension made on SWUM was for the optimiz<strong>in</strong>g calculation.<br />
In the optimiz<strong>in</strong>g calculation, a s<strong>in</strong>gle simulation of the time<br />
<strong>in</strong>tegration is repeated chang<strong>in</strong>g the design variables until a given objective<br />
function is maximized. For the design variables, all the <strong>in</strong>put data,<br />
such as the body geometry of the swimmer <strong>and</strong> jo<strong>in</strong>t motion, can be<br />
employed. With respect to the objective function, the user can describe<br />
it freely us<strong>in</strong>g the output data, such as maximiz<strong>in</strong>g the swimm<strong>in</strong>g speed<br />
<strong>and</strong> maximiz<strong>in</strong>g the propulsive efficiency. As the optimiz<strong>in</strong>g algorithm,<br />
the Downhill Simplex method was employed. This extension has been<br />
implemented <strong>in</strong> Swumsuit version 2.0.0.<br />
The second extension was the musculoskeletal simulation. In the<br />
musculoskeletal simulation, the human body is modeled as a series of<br />
body segments accompany<strong>in</strong>g muscles modeled as wires. For the musculoskeletal<br />
calculation of the present study, commercial software, Any-<br />
Body Model<strong>in</strong>g System (AnyBody) (AnyBody Technology, Denmark)<br />
was employed. The whole body musculoskeletal model with 458 muscles<br />
shown <strong>in</strong> Fig.1 was employed for the present study. With respect to the<br />
data connection between SWUM <strong>and</strong> AnyBody, the jo<strong>in</strong>t motion (relative<br />
body motion) is given as <strong>in</strong>put data <strong>and</strong> the absolute movement of<br />
the whole body is calculated as output data <strong>in</strong> SWUM. These motion<br />
data are <strong>in</strong>put <strong>in</strong>to AnyBody. The fluid forces act<strong>in</strong>g on swimmer are<br />
also <strong>in</strong>put <strong>in</strong>to AnyBody as external forces distributed on the swimmer’s<br />
body. This extension has been implemented <strong>in</strong> Swumsuit 3.0.0.<br />
Figure 1. Whole body musculoskeletal model with 458 muscles employed<br />
for the musculoskeletal simulation.<br />
The third extension was “multi agent/object simulation.” “Multi agents”<br />
means multiple swimmers <strong>and</strong> “multi objects” means implements for<br />
swimm<strong>in</strong>g such as f<strong>in</strong>s, a start<strong>in</strong>g block, the pool wall, <strong>and</strong> so on. Before<br />
this extension, SWUM had been capable of analyz<strong>in</strong>g one swimmer<br />
only by one simulation program. In the multi agent/object simulation,<br />
multiple simulation programs for multiple agents/objects run simultaneously<br />
to analyze. In addition to this, mechanical <strong>in</strong>teraction among<br />
the agents/objects can be described freely by the user. For example, if the<br />
user would like to attach a f<strong>in</strong> to the swimmer, it can be simulated by<br />
locat<strong>in</strong>g a sufficiently strong “virtual” spr<strong>in</strong>g between the swimmer <strong>and</strong><br />
f<strong>in</strong>. This extension has been implemented <strong>in</strong> Swumsuit 4.0.0.<br />
With respect to the accuracy of simulation, it is difficult to estimate<br />
the general value for all cases. The validation study for each case will be<br />
necessary for the future task.<br />
results And dIscussIon<br />
The optimiz<strong>in</strong>g calculation for the trunk motion of the underwater dolph<strong>in</strong><br />
kick has already been carried out by the authors (Nakashima, 2009).<br />
From this optimization, it was found that the obta<strong>in</strong>ed optimal motion<br />
which maximizes the propulsive efficiency is considerably similar to that<br />
of an elite athlete swimmer, <strong>in</strong> which the amplitude of the upper limbs’<br />
displacement is small, the trunk moves as a ‘pitch<strong>in</strong>g seesaw’ with a node,<br />
<strong>and</strong> the lower limbs form a travel<strong>in</strong>g wave. As the next application of<br />
the optimiz<strong>in</strong>g calculation, the optimization of arm stroke <strong>in</strong> the freestyle<br />
swimm<strong>in</strong>g has recently been tackled by the authors (Nakashima et<br />
al., 2009). In this optimization, the maximum jo<strong>in</strong>t torque characteristics<br />
were imposed, <strong>and</strong> the design variables were jo<strong>in</strong>t angles dur<strong>in</strong>g the<br />
underwater stroke. As the next step, the optimization for more detailed<br />
maximum jo<strong>in</strong>t torque characteristics, which depend on jo<strong>in</strong>t angles <strong>and</strong><br />
angular velocities, is now <strong>in</strong> progress. An example of its results is shown <strong>in</strong><br />
chaPter2.<strong>Biomechanics</strong><br />
Figure 2. In this optimization, the swimm<strong>in</strong>g speed was maximized under<br />
the constra<strong>in</strong>ts of the jo<strong>in</strong>t torque characteristics <strong>and</strong> the range of motion<br />
of the jo<strong>in</strong>ts. Note that the time t was nondimensionalized by the stroke<br />
cycle. In order to reduce the calculation time, PSO (Particle Swarm Optimization)<br />
was employed as the optimiz<strong>in</strong>g method <strong>in</strong>stead of the Downhill<br />
Simplex method. The dark l<strong>in</strong>es emitt<strong>in</strong>g from the swimmer’s body<br />
represent the po<strong>in</strong>t of application, direction, <strong>and</strong> magnitude of the fluid<br />
force act<strong>in</strong>g on the swimmer. It was found that the thrust by the h<strong>and</strong> had<br />
two clear peaks when pull<strong>in</strong>g (t = 0.29) <strong>and</strong> push<strong>in</strong>g (t = 0.54) the water.<br />
Figure 2. Simulation results of optimiz<strong>in</strong>g calculation (maximiz<strong>in</strong>g<br />
swimm<strong>in</strong>g speed under constra<strong>in</strong>ts with respect to jo<strong>in</strong>t torque characteristics).<br />
Top: side view, bottom: bottom view.<br />
Next, the musculoskeletal simulation of the crawl stroke was carried out<br />
by Nakashima et al. (2007a). The simulation results of muscle activities<br />
were compared to those of an experiment <strong>in</strong> a previous study. It was<br />
found that most of the tim<strong>in</strong>gs of the muscle activations <strong>in</strong> the simulation<br />
agreed with those <strong>in</strong> the experiment. The analyses of the other<br />
three strokes have also been conducted (Nakashima et al., 2008). Many<br />
reasonable tendencies were obta<strong>in</strong>ed <strong>in</strong> the simulation results. As a next<br />
step, the exam<strong>in</strong>ation of quantitative accuracy of the simulation is now<br />
<strong>in</strong> progress. For this exam<strong>in</strong>ation, the simulation results based on motion<br />
analysis data were compared with experimental EMG data, which<br />
were measured simultaneously with the swimm<strong>in</strong>g motion. An example<br />
of the simulated <strong>and</strong> experimental results is shown <strong>in</strong> Fig.3. It was found<br />
that the swimm<strong>in</strong>g motion obta<strong>in</strong>ed <strong>in</strong> the experiment was represented<br />
well by the simulation. Note that the time t is nondimensional. It was<br />
also found that the upper limb muscles were activated dur<strong>in</strong>g the h<strong>and</strong><br />
stroke (Fig.3 (d)), <strong>and</strong> that the lower limb muscles were activated dur<strong>in</strong>g<br />
the kick (Fig.3 (f )). If the accuracy of such musculoskeletal simulation<br />
becomes satisfactory, it will be greatly useful for the tra<strong>in</strong><strong>in</strong>g <strong>and</strong> coach<strong>in</strong>g<br />
of swimmers.<br />
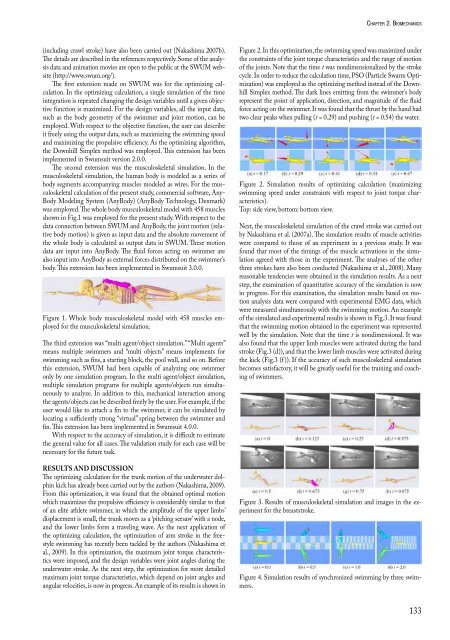
Figure 3. Results of musculoskeletal simulation <strong>and</strong> images <strong>in</strong> the experiment<br />
for the breaststroke.<br />
Figure 4. Simulation results of synchronized swimm<strong>in</strong>g by three swimmers.<br />
133














