

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Biomechanics</strong><strong>and</strong>medic<strong>in</strong>e<strong>in</strong>swimm<strong>in</strong>gXi<br />
Motor Coord<strong>in</strong>ation Dur<strong>in</strong>g the Underwater<br />
Undulatory Swimm<strong>in</strong>g Phase of the Start for High<br />
Level Swimmers<br />
elipot, M. 1, 2 , houel, n. 2 , hellard, P. 2 , dietrich, G. 1<br />
1 Université Paris Descartes, Paris, France<br />
2 Fédération française de natation, Paris, France<br />
The aim of the present study was to identify the ma<strong>in</strong> motor coord<strong>in</strong>ation<br />
<strong>in</strong>volved dur<strong>in</strong>g the underwater undulatory swimm<strong>in</strong>g phase of<br />
the start. Twelve French high-level swimmers took part <strong>in</strong> this study.<br />
Swimmers were filmed dur<strong>in</strong>g the entire underwater phase of the start<br />
(i.e. fifteen meters from the start platform). Specific anatomical l<strong>and</strong>marks<br />
were identified on the body of the swimmers <strong>and</strong> 2D space coord<strong>in</strong>ates<br />
of these l<strong>and</strong>marks were calculated. Cross correlation functions<br />
were used to <strong>in</strong>vestigate the motor coord<strong>in</strong>ation between the actions of<br />
the hip, the knee <strong>and</strong> the ankle. Results show that high-level swimmers<br />
regulate the leg amplitude thanks to a strong synergy between the hip<br />
<strong>and</strong> the ankle <strong>and</strong> an <strong>in</strong>dependent action of the knee.<br />
Key words: Motor control, start, underwater undulatory swimm<strong>in</strong>g<br />
INTRODUCTION<br />
High-level athletes are characterised by superior tactical, physical <strong>and</strong><br />
technical levels. Improv<strong>in</strong>g one of these factors will lead to a performance<br />
improvement. As <strong>in</strong> many other sports, swimm<strong>in</strong>g performance<br />
is strongly l<strong>in</strong>ked to the technical level of the swimmers. Swimm<strong>in</strong>g<br />
performance optimisation requires an accurate analysis of the swimmers’<br />
movement. <strong>Biomechanics</strong> <strong>and</strong> motor control sciences give useful tools<br />
to realise such analysis. Motor control theories, <strong>and</strong> more especially the<br />
jo<strong>in</strong>t synergies theories, will <strong>in</strong>deed help to underst<strong>and</strong> how high level<br />
swimmers are able to produce specific, appropriate <strong>and</strong> efficient motor<br />
pattern.<br />
Many previous researches have already shown that start performance<br />
is determ<strong>in</strong>ant to achieve a good race performance. Depend<strong>in</strong>g on the<br />
studies, start performance is def<strong>in</strong>ed as the time to complete the 10 or<br />
15 first meters from the start wall (Alves, 1993; Arellano et al., 1996;<br />
Mason <strong>and</strong> Cossor, 2000). The start consists of 3 phases: the impulsion<br />
phase, the aerial phase <strong>and</strong> the underwater phase (Maglischo, 2003).<br />
This underwater phase of the start could be divided <strong>in</strong> 2 phases, i.e. the<br />
glide phase <strong>and</strong> the underwater undulatory swimm<strong>in</strong>g phase (Maglischo,<br />
2003).<br />
Dur<strong>in</strong>g the glide, swimmers aim to keep the supra-maximal velocity<br />
created dur<strong>in</strong>g the impulsion <strong>and</strong> aerial phases as high as possible <strong>and</strong><br />
as long as possible. A previous study has already shown that dur<strong>in</strong>g the<br />
glide phase high level swimmers presented a strong jo<strong>in</strong>t synergy between<br />
the shoulders, the hip <strong>and</strong> the knee (Elipot et al, 2009). It seems<br />
that with this synergic action of those three jo<strong>in</strong>ts high level swimmers<br />
are able to hold a streaml<strong>in</strong>ed position dur<strong>in</strong>g the whole glide phase.<br />
Hydrodynamic resistance are decreased <strong>and</strong> supra-maximal velocity is<br />
kept longer. Dur<strong>in</strong>g the underwater undulatory swimm<strong>in</strong>g, the swimmers’<br />
aim is to produce velocities with leg action. Swimmers have then<br />
to f<strong>in</strong>d the optimal compromise between the amplitude <strong>and</strong> the frequency<br />
of the leg undulatory movements (Arellano, 2008). Swimmers<br />
have to f<strong>in</strong>d the optimal compromise between propulsion force creation<br />
<strong>and</strong> hydrodynamic resistance decrease. Identify<strong>in</strong>g the motor coord<strong>in</strong>ation<br />
dur<strong>in</strong>g this underwater undulatory swimm<strong>in</strong>g phase of the start is a<br />
major step to underst<strong>and</strong> <strong>and</strong> optimise this phase.<br />
The aim of this study was to determ<strong>in</strong>e the motor coord<strong>in</strong>ation that<br />
high-level swimmers are able to produce dur<strong>in</strong>g the underwater undulatory<br />
swimm<strong>in</strong>g phase of the start.<br />
72<br />
<strong>Biomechanics</strong> <strong>and</strong> <strong>Medic<strong>in</strong>e</strong> <strong>XI</strong> Chapter 2 <strong>Biomechanics</strong><br />
Swimmers have then to f<strong>in</strong>d the optimal compromise between the amplitude <strong>and</strong> the<br />
frequency of the leg undulatory movements (Arellano, 2008). Swimmers have to f<strong>in</strong>d<br />
the optimal compromise between propulsion force creation <strong>and</strong> hydrodynamic<br />
resistance decrease. Identify<strong>in</strong>g the motor coord<strong>in</strong>ation dur<strong>in</strong>g this underwater<br />
undulatory swimm<strong>in</strong>g phase of the start is a major step to underst<strong>and</strong> <strong>and</strong> optimise this<br />
phase.<br />
Methods The aim of this study was to determ<strong>in</strong>e the motor coord<strong>in</strong>ation that high-level<br />
swimmers are able to produce dur<strong>in</strong>g the underwater undulatory swimm<strong>in</strong>g phase of the<br />
Subjects start. <strong>and</strong> <strong>in</strong>structions:<br />
Twelve male swimmers participated <strong>in</strong> this study. All were <strong>in</strong>formed of<br />
METHODS<br />
the Subjects aim of <strong>and</strong> the <strong>in</strong>structions: study <strong>and</strong> signed a consent form. All participants were<br />
high-level Twelve male swimmers participated <strong>and</strong> were <strong>in</strong> members this study. of All the were French <strong>in</strong>formed National of the aim of Swim- the<br />
study <strong>and</strong> signed a consent form. All participants were high-level swimmers <strong>and</strong> were<br />
m<strong>in</strong>g Team. Swimmers’ characteristics are summarized <strong>in</strong> Table 1.<br />
members of the French National Swimm<strong>in</strong>g Team. Swimmers’ characteristics are<br />
summarized <strong>in</strong> Table 1.<br />
Table 1. Swimmers’ general characteristics (n = 12).<br />
Table 1. Swimmers’ general characteristics (n = 12).<br />
Height (m) Weight ( kg)<br />
Best performance (freestyle)<br />
50-m (s) 50-m (%) 100-m (s) 100-m (%)<br />
Mean 1.83 76.1 24.39 116.47 52.26 111.4<br />
SD 4.89 5.18 1.26 6.02 1.68 3.57<br />
Swimmers were asked to perform 3 grab starts as fast as possible. Only the best<br />
start was analysed (i.e. the best time to complete 15 meters from the start wall). All<br />
swimmers were regularly tra<strong>in</strong>ed to perform this k<strong>in</strong>d of start <strong>and</strong> use it dur<strong>in</strong>g<br />
competition.<br />
Experimental set up <strong>and</strong> data analysis:<br />
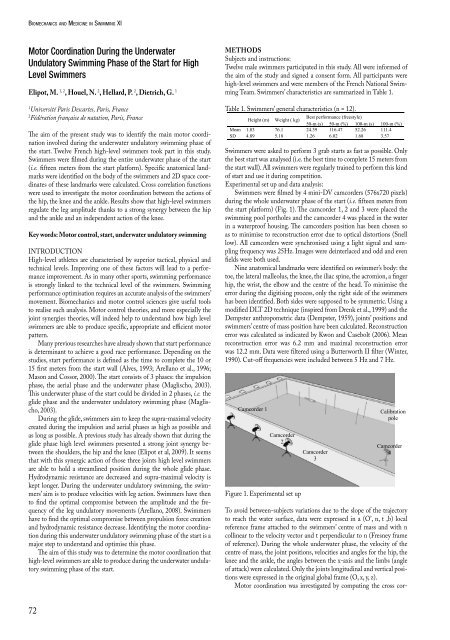
Swimmers were filmed by 4 m<strong>in</strong>i-DV camcorders (576x720 pixels) dur<strong>in</strong>g the<br />
whole underwater phase of the start (i.e. fifteen meters from the start platform) (Fig. 1).<br />
The camcorder 1, 2 <strong>and</strong> 3 were placed the swimm<strong>in</strong>g pool portholes <strong>and</strong> the camcorder<br />
4 was placed <strong>in</strong> the water <strong>in</strong> a waterproof hous<strong>in</strong>g. The camcorders position has been<br />
chosen so as to m<strong>in</strong>imise to reconstruction error due to optical distortions (Snell low).<br />
All camcorders were synchronised us<strong>in</strong>g a light signal <strong>and</strong> sampl<strong>in</strong>g frequency was<br />
25Hz. Images were de<strong>in</strong>terlaced <strong>and</strong> odd <strong>and</strong> even fields were both used.<br />
N<strong>in</strong>e anatomical l<strong>and</strong>marks were identified on swimmer’s body: the toe, the<br />
lateral malleolus, the knee, the iliac sp<strong>in</strong>e, the acromion, a f<strong>in</strong>ger hip, the wrist, the<br />
elbow <strong>and</strong> the centre of the head. To m<strong>in</strong>imise the error dur<strong>in</strong>g the digitis<strong>in</strong>g process,<br />
only the right side of the swimmers has been identified. Both sides were supposed to be<br />
symmetric. Us<strong>in</strong>g a modified DLT 2D technique (<strong>in</strong>spired from Drenk et al., 1999) <strong>and</strong><br />
the Dempster anthropometric data (Dempster, 1959), jo<strong>in</strong>ts’ positions <strong>and</strong> swimmers’<br />
centre of mass position have been calculated. Reconstruction error was calculated as<br />
<strong>in</strong>dicated by Kwon <strong>and</strong> Casebolt (2006). Mean reconstruction error was 6.2 mm <strong>and</strong><br />
maximal reconstruction error was 12.2 mm. Data were filtered us<strong>in</strong>g a Butterworth II<br />
filter (W<strong>in</strong>ter, 1990). Cut-off frequencies were <strong>in</strong>cluded between 5 Hz <strong>and</strong> 7 Hz.<br />
Swimmers were asked to perform 3 grab starts as fast as possible. Only<br />
the best start was analysed (i.e. the best time to complete 15 meters from<br />
the start wall). All swimmers were regularly tra<strong>in</strong>ed to perform this k<strong>in</strong>d<br />
of start <strong>and</strong> use it dur<strong>in</strong>g competition.<br />
Experimental set up <strong>and</strong> data analysis:<br />
Swimmers were filmed by 4 m<strong>in</strong>i-DV camcorders (576x720 pixels)<br />
dur<strong>in</strong>g the whole underwater phase of the start (i.e. fifteen meters from<br />
the start platform) (Fig. 1). The camcorder 1, 2 <strong>and</strong> 3 were placed the<br />
swimm<strong>in</strong>g pool portholes <strong>and</strong> the camcorder 4 was placed <strong>in</strong> the water<br />
<strong>in</strong> a waterproof hous<strong>in</strong>g. The camcorders position has been chosen so<br />
as to m<strong>in</strong>imise to reconstruction error due to optical distortions (Snell<br />
low). All camcorders were synchronised us<strong>in</strong>g a light signal <strong>and</strong> sampl<strong>in</strong>g<br />
frequency was 25Hz. Images were de<strong>in</strong>terlaced <strong>and</strong> odd <strong>and</strong> even<br />
fields were both used.<br />
N<strong>in</strong>e anatomical l<strong>and</strong>marks were identified on swimmer’s body: the<br />
toe, the lateral malleolus, the knee, the iliac sp<strong>in</strong>e, the acromion, a f<strong>in</strong>ger<br />
hip, the wrist, the elbow <strong>and</strong> the centre of the head. To m<strong>in</strong>imise the<br />
error dur<strong>in</strong>g the digitis<strong>in</strong>g process, only the right side of the swimmers<br />
has been identified. Both sides were supposed to be symmetric. Us<strong>in</strong>g a<br />
modified DLT 2D technique (<strong>in</strong>spired from Drenk et al., 1999) <strong>and</strong> the<br />
Dempster anthropometric data (Dempster, 1959), jo<strong>in</strong>ts’ positions <strong>and</strong><br />
swimmers’ centre of mass position have been calculated. Reconstruction<br />
error was calculated as <strong>in</strong>dicated by Kwon <strong>and</strong> Casebolt (2006). Mean<br />
reconstruction error was 6.2 mm <strong>and</strong> maximal reconstruction error<br />
was 12.2 mm. Data were filtered us<strong>in</strong>g a Butterworth II filter (W<strong>in</strong>ter,<br />
1990). <strong>Biomechanics</strong> Cut-off <strong>and</strong> frequencies <strong>Medic<strong>in</strong>e</strong> <strong>XI</strong> were <strong>in</strong>cluded Chapter 2 <strong>Biomechanics</strong> between 5 Hz <strong>and</strong> 7 Hz.<br />
Camcorder 1<br />
Camcorder<br />
2<br />
Camcorder<br />
3<br />
Figure 1. Experimental set up<br />
Figure 1. Experimental set up<br />
To avoid between-subjects variations due to the slope of the trajectory to reach the<br />
To water avoid surface, between-subjects data were expressed variations <strong>in</strong> a (O’, due n, t to ,b) the local slope reference of the frame trajectory attached to the<br />
swimmers’ centre of mass <strong>and</strong> with n coll<strong>in</strong>ear to the velocity vector <strong>and</strong> t perpendicular<br />
to reach the water surface, data were expressed <strong>in</strong> a (O’, n, t ,b) local<br />
to n (Fresney frame of reference). Dur<strong>in</strong>g the whole underwater phase, the velocity of<br />
reference the centre of frame mass, attached the jo<strong>in</strong>t positions, to the swimmers’ velocities <strong>and</strong> centre angles of for mass the hip, <strong>and</strong> the with knee n <strong>and</strong> the<br />
coll<strong>in</strong>ear ankle, the to angles the velocity between vector the x-axis <strong>and</strong> <strong>and</strong> t perpendicular the limbs (angle to of n (Fresney attack) were frame calculated.<br />
of Only reference). the jo<strong>in</strong>ts longitud<strong>in</strong>al Dur<strong>in</strong>g the <strong>and</strong> whole vertical underwater positions were phase, expressed the velocity <strong>in</strong> the orig<strong>in</strong>al of the global<br />
frame (O, x, y, z).<br />
centre Motor of mass, coord<strong>in</strong>ation the jo<strong>in</strong>t was positions, <strong>in</strong>vestigated velocities by comput<strong>in</strong>g <strong>and</strong> angles the cross for correlation the hip, the functions<br />
knee between <strong>and</strong> all the ankle, calculated the k<strong>in</strong>ematics angles between variables. the These x-axis k<strong>in</strong>ematic <strong>and</strong> the data limbs were (angle represented<br />
of <strong>in</strong> form attack) of were time-dependent calculated. signals. Only the Results jo<strong>in</strong>ts were longitud<strong>in</strong>al obta<strong>in</strong>ed us<strong>in</strong>g <strong>and</strong> Matlab vertical software posi- (The<br />
Matworks Inc., USA). Level of confidence was set at 95% (p














